-
 @ThothChildren
@ThothChildren
- 2018.9.6
- PV 968
FABRIKによる逆運動学
ー 概要 ー
FABRIK IK(Forward And Backward Reaching inverse kinematics)は、根元と先端を交互に基準として繰り返しながら関節角度を調整していくことで、逆運動学の解を得る.アルゴリズムはシンプルで、実装も容易い.



この章を学ぶ前に必要な知識
条件
- 関節角とスタートの初期角度列とゴール位置
- リンクの長さ
効果
- 逆運動学の解を得られる
ポイント
- ヒューリスティックの方法であるため、理解しやすく実装が容易
- 一つ前の関節位置を保持しておく
解 説
わかりやすいFABRIKによる逆運動学の解説動画 | |
FABRIK IK(Forward And Backward Reaching inverse kinematics)は、根元にリンクをつなげていったときと先端にリンクをつなげていったときを交互に基準として繰り返しながら関節角度を調整していくことで、逆運動学の解を得る.
ヒューリスティックな手法で効率的に角度を求めていくことができる.理解しやすくまた実装も容易であるのが特徴.
必要な入力
・リンクの長さ
・初期関節角度
・ゴール位置
・リンク根元位置
処理の流れ
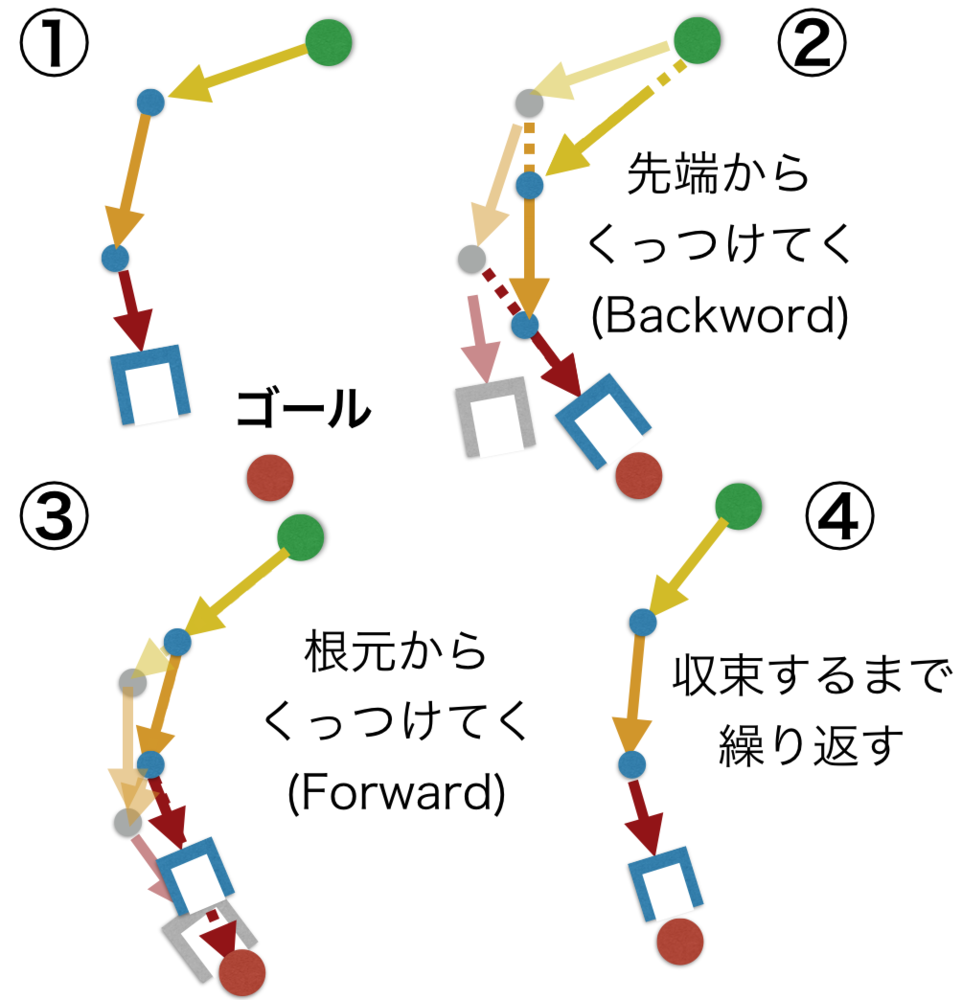
1. まず、すべてのリンクが繋がっていて、根元から伸びているものとする.(図の①の状態)
2. 根元からリンクが繋がっているとき、先端のリンクからゴール側のリンクが伸びるようにゴールからつなげていく.このときまだ収束していなければ、根元とリンクは繋がっていない. 移動した関節は繋げる位置は一つ前のリンクから決まるが、方向は移動前の関節にリンクが向くように調整する. (図の②の状態)
3. ゴールからリンクが繋がっている時は、逆に根元側からリンクがつながるようにリンクを移動させていく.2と同様に位置を決めていく.(図の③の状態)
4.これを2と3を交互に収束するまで繰り返す.
| FABRIK IKとは |
FABRIK IKの論文は右参照.
FABRIK IK自体はUnreal Engine等でも使用することができる. | 外部リンク FABRIK IKの論文 |
FABRIK IK の解説動画 | |
FABRIKと他手法との比較 |
この章を学んで新たに学べる
Comments