-
 @ThothChildren
@ThothChildren
- 2018.11.7
- PV 798
カウンタウェイト重力補償機構
ー 概要 ー
カウンタウェイト重力補償機構は、ロボットアームの自重を相殺するような重りをあらかじめアームの反対側に備えることで機構的に重力補償をしトルクを抑えるアーム機構.アームの変形などではバランスが取れずまたロボット全体の重量が増えるなどあり、アーム根元のみに取り付けることが一般的.



この章を学ぶ前に必要な知識
効果
- ロボットの自重をキャンセルできる(重力補償)
ポイント
- ロボット全体の重量が重くなる
- 形状によっては嵩張る
- アームの姿勢が変形すると適切な釣り合いが維持できない
- 支持部に大きなモーメントがかからない
- ロボットのアームの一番根元のみに用意することが多い
- 慣性モーメントを小さくするには長くするか重くする必要があるが、そうすると重量が増える
解 説
カウンタウェイト重力補償機構は、ロボットアームの自重を相殺するような重り(カウンタウェイト)をあらかじめアームの反対側に備えることで機構的に重力補償をしトルクを抑えるアーム機構.アームを支えるトルクをモータが出力する必要がないため、低出力なモータを使用してロボットアームを支持することができる.そのため、仮に人間との接触があったとしても大きなトルクを発生させることがないため、安全面においても有利.
アームの変形などではバランスが取れずまたロボット全体の重量が増えるなどあり、それぞれの関節につけることはなくアーム根元のみに取り付けることが一般的. | カウンタウェイト重力補償機構とは |
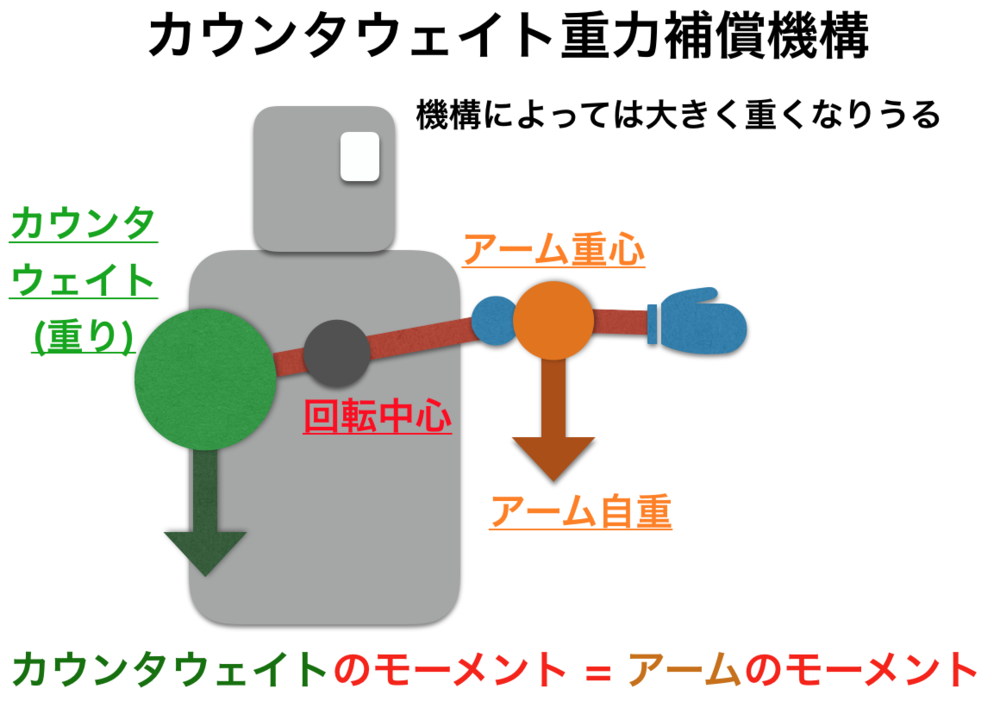
\(m_{W}\)をカウンタウェイトの質量, \(m_{Arm}\)をアームの質量, \(L_{W}\)をカウンタウェイトの回転中心からの距離, \(L_{Arm}\)をアーム重心の回転中心からの距離, とすると、
以下のようにモーメントの釣り合いを記述することができる.
$$m_{W} g \cdot L_{W}=m_{Arm} g \cdot L_{ArmG}$$
$$m_{W} \cdot L_{W}=m_{Arm}\cdot L_{ArmG}$$
全体の許容される大きさからカウンタウェイトの\(L_{W}\)とカウンタウェイトの\(m_{W}\)のバランスを調整さえすればよい. | カウンタウェイト重力補償機構の原理 |
| カウンタウェイト重力補償機構の概略図 |
カウントウェイト型の重力補償機構は、幾らか他にもある.
その一例を以下の画像に示す.
以下のようなパラレルなリンクを設けることでコンパクト(省スペース)にカウンタウェイトを実現できる,この場合に必要な重量は先と同様. | カウンタウェイト他事例 |
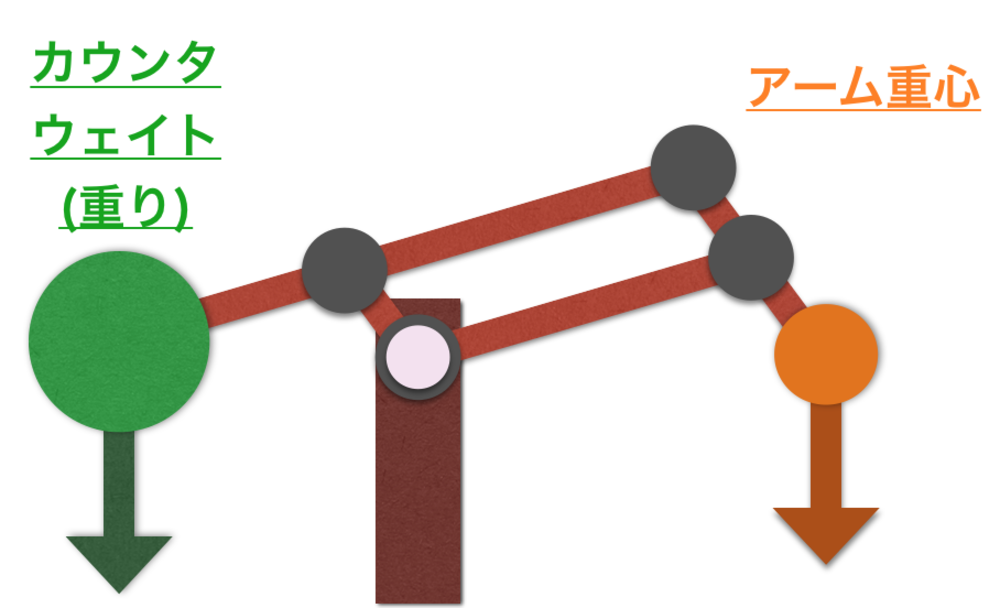 | カウンタウェイト重力補償他事例 |
この章を学んで新たに学べる
Comments