-
 @ThothChildren
@ThothChildren
- 2018.12.9
- PV 374
サリエンシマップとは
ー 概要 ー
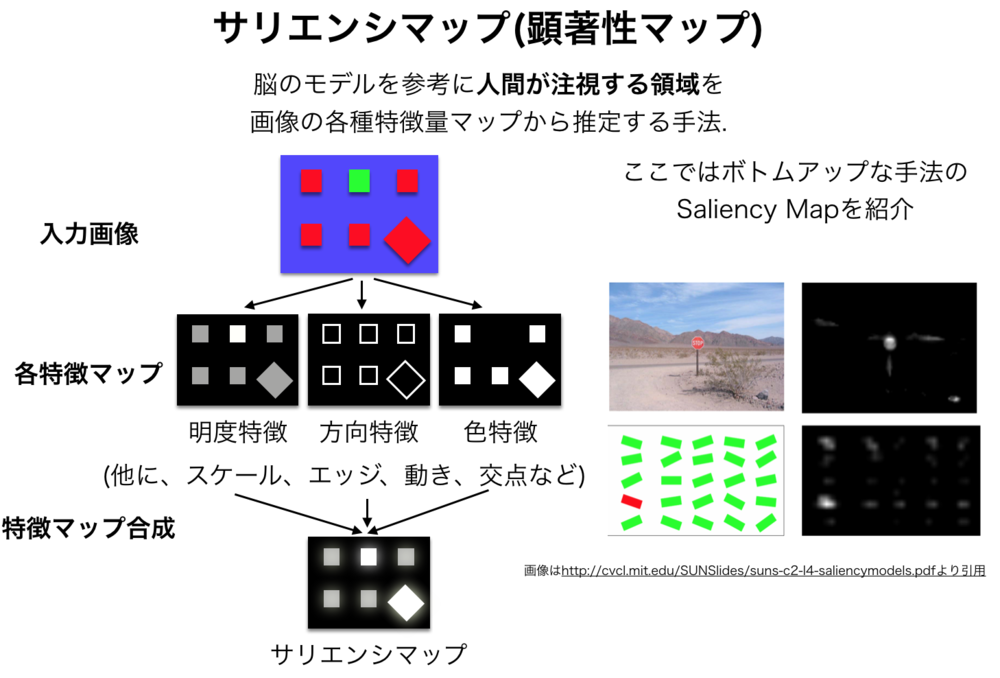
サリエンシマップ(顕著性マップ)は、人間の脳のモデルから着想を得て画像の局所特徴量の組み合わせによって注視領域を算出する技術のこと.特徴量としてはコントラストや明度、色など様々なものが使用されます.動画に用いるときは動きや早さなども特徴に含まれます.ここではボトムアップな手法を紹介します.



この章を学ぶ前に必要な知識
条件
- 画像が入力
- どのような特徴マップを生成するか決めておく
効果
- 人間が注視しそうな領域を可視化した画像を生成
- 生成された領域に基づいてクリッピングなどを行う
ポイント
- 人間の脳のモデルを参考に考案されたモデル
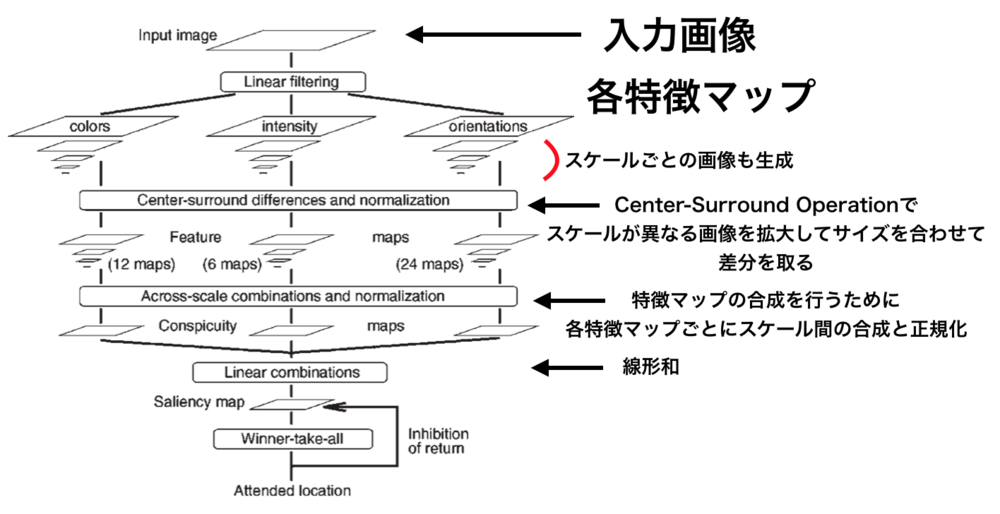
- 画像からそれぞれの特徴マップを算出して、それらを統合して注視領域を決める
- 局所的な特徴量から生成するボトムアップな手法とタスクから注視領域を求めるトップダウンな手法が提案されている
- 様々な特徴マップが提案されている.動画になると時間方向の特徴も増える.
解 説
この章を学んで新たに学べる
Comments
Reasons
知識: DoG
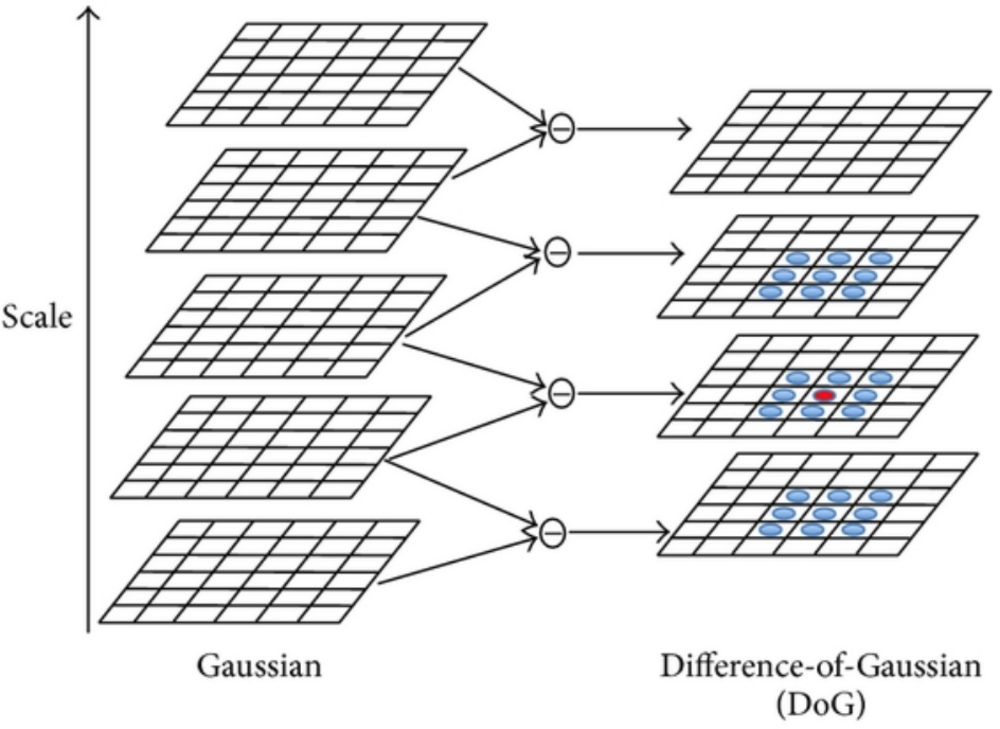
DoG(Difference of two Gaussian)は、LoGでの重いフィルタ処理をガウシアンの差分によって近似し軽量化したフィルタ.各スケールσ、kσ、k^2σ、等σの大きさを変えてフィルタ処理したのちにその差分を計算.値が0になっているところがエッジ.
上記のような工夫をしても尚、σを大きくしたガウシアンフィルタの計算は重いため、σを大きくするのではなく、入力画像をダウンサンプリングすることでさらなる軽量化を行います