ロボット工学のプランニングの用語
ロボット工学のプランニング関係の知識に関連した用語についてまとめているページです.
2018.10.14
-
130Views
-
0Watch
-
3Knows
-
一つ上へ
-
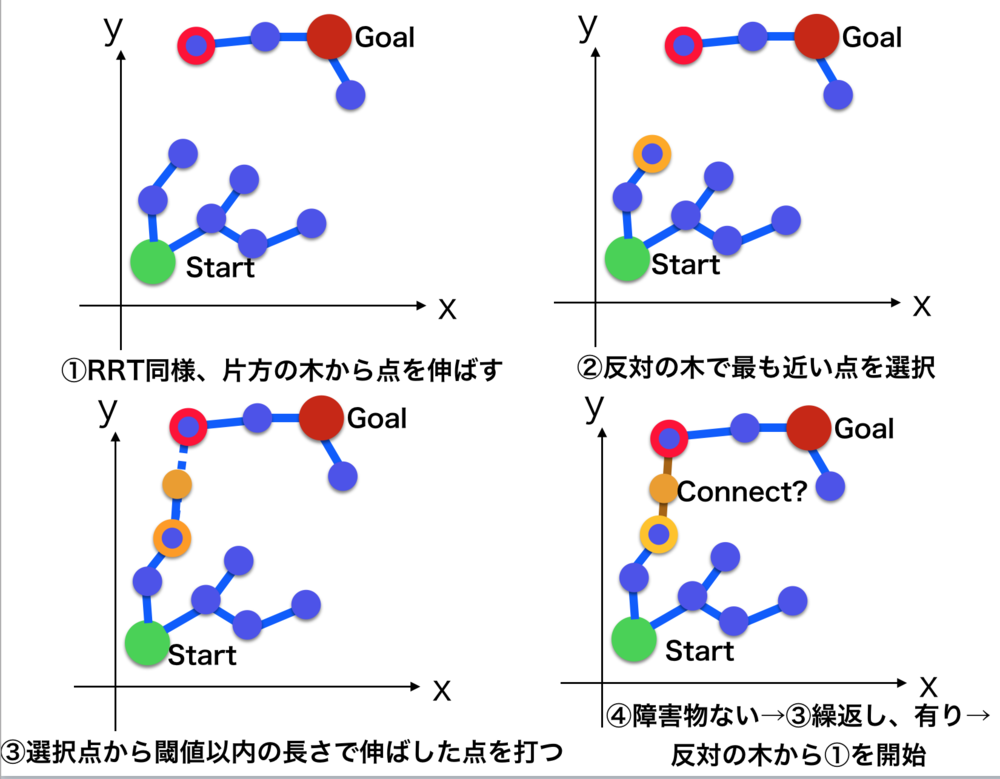
RRT-ConnectRRT-ConnectはRRTを用いてコンフィギュレーション空間における高次元空間の探索を効率よく行い、スタートからゴールまでのパスを見つけるアルゴリズム.
-
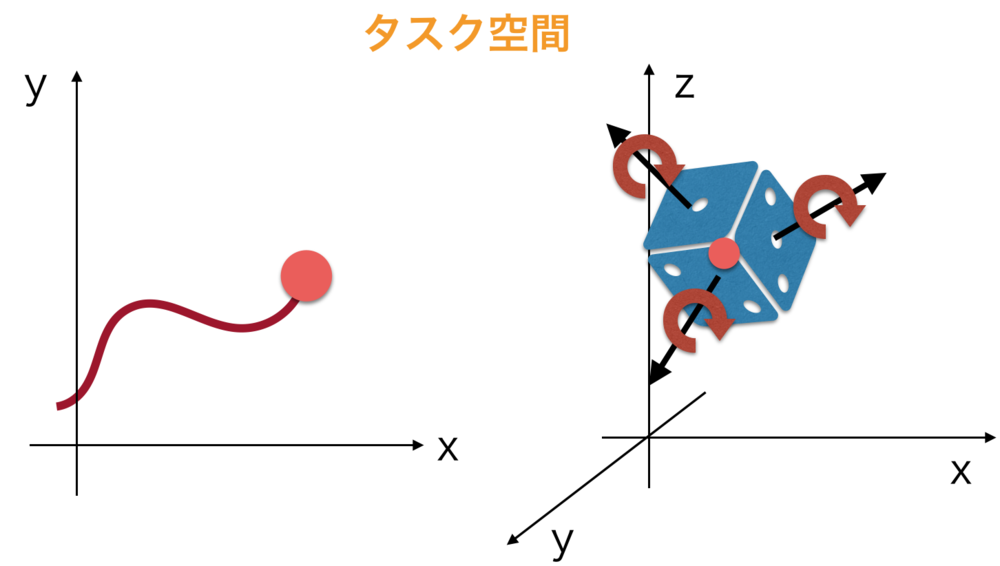
タスク空間タスク空間は、ロボット工学においてタスクを表現する上でもっとも自然な座標系を用いて表現した空間のこと.例えばある軌道でボールを動かしたいときは、(x,y,z)の座標系、剛体の位置を制御したいときは、姿勢を含めて(x,y,z,θ,γ,ψ)の6座標を使って表現する.
-
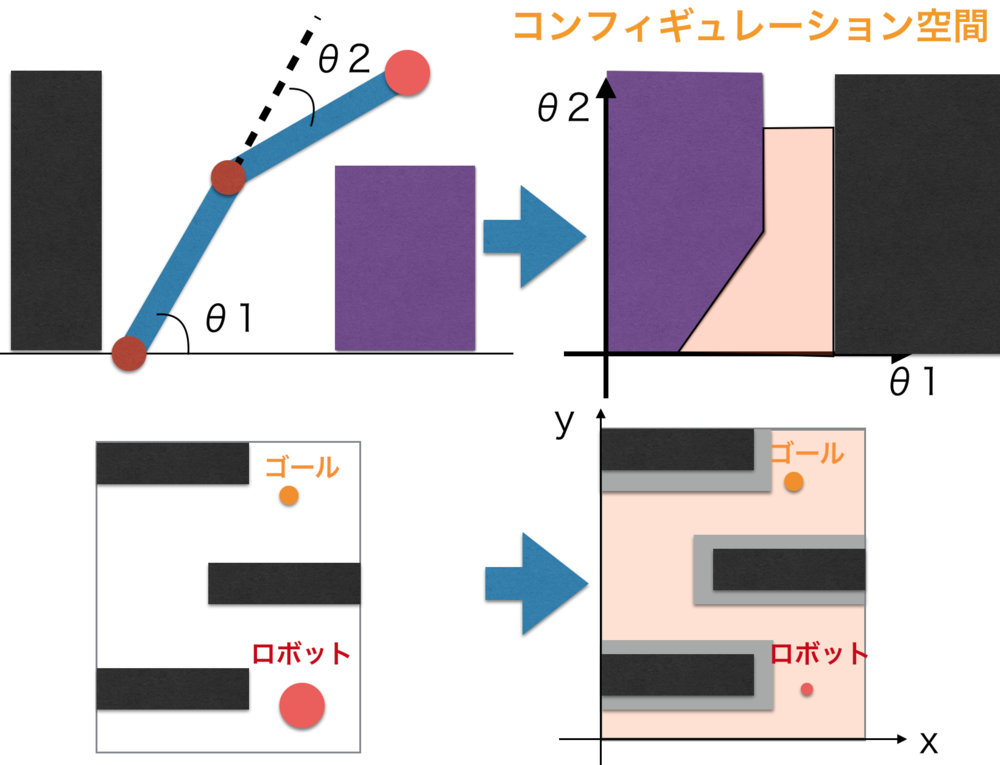
コンフィギュレーション空間コンフィギュレーション空間(C-Space, Configuration Space)はロボットの経路計画、軌道計画等を考える上でロボットが取りうる姿勢や位置、関節角度等を表現する空間のこと.自由度が高いロボットではコンフィギュレーション空間が高次元になり、計算量が膨大になる.コンフィギュレーションとはロボットのパラメータの値を全て指定したもので、コンフィギュレーション空間はロボットが取りうる全ての値を指す.
|
|
ロボット工学のプランニングの用語の新規投稿
RRT-Connect
RRT-ConnectはRRTを用いてコンフィギュレーション空間における高次元空間の探索を効率よく行い、スタートからゴールまでのパスを見つけるアルゴリズム.
PV 451
Fav 0
2018.10.14
タスク空間
タスク空間は、ロボット工学においてタスクを表現する上でもっとも自然な座標系を用いて表現した空間のこと.例えばある軌道でボールを動かしたいときは、(x,y,z)の座標系、剛体の位置を制御したいときは、姿勢を含めて(x,y,z,θ,γ,ψ)の6座標を使って表現する.
PV 382
Fav 0
2018.10.14
コンフィギュレーション空間
コンフィギュレーション空間(C-Space, Configuration Space)はロボットの経路計画、軌道計画等を考える上でロボットが取りうる姿勢や位置、関節角度等を表現する空間のこと.自由度が高いロボットではコンフィギュレーション空間が高次元になり、計算量が膨大になる.コンフィギュレーションとはロボットのパラメータの値を全て指定したもので、コンフィギュレーション空間はロボットが取りうる全ての値を指す.
PV 1078
Fav 0
2018.10.14
ロボット工学のプランニングの用語人気知識・質問
コンフィギュレーション空間
コンフィギュレーション空間(C-Space, Configuration Space)はロボットの経路計画、軌道計画等を考える上でロボットが取りうる姿勢や位置、関節角度等を表現する空間のこと.自由度が高いロボットではコンフィギュレーション空間が高次元になり、計算量が膨大になる.コンフィギュレーションとはロボットのパラメータの値を全て指定したもので、コンフィギュレーション空間はロボットが取りうる全ての値を指す.
PV 1078
Fav 0
2018.10.14
RRT-Connect
RRT-ConnectはRRTを用いてコンフィギュレーション空間における高次元空間の探索を効率よく行い、スタートからゴールまでのパスを見つけるアルゴリズム.
PV 451
Fav 0
2018.10.14
タスク空間
タスク空間は、ロボット工学においてタスクを表現する上でもっとも自然な座標系を用いて表現した空間のこと.例えばある軌道でボールを動かしたいときは、(x,y,z)の座標系、剛体の位置を制御したいときは、姿勢を含めて(x,y,z,θ,γ,ψ)の6座標を使って表現する.
PV 382
Fav 0
2018.10.14