-
 @ThothChildren
@ThothChildren
- 2018.10.25
- PV 963
位置制御(エンドエフェクタ)
ー 概要 ー
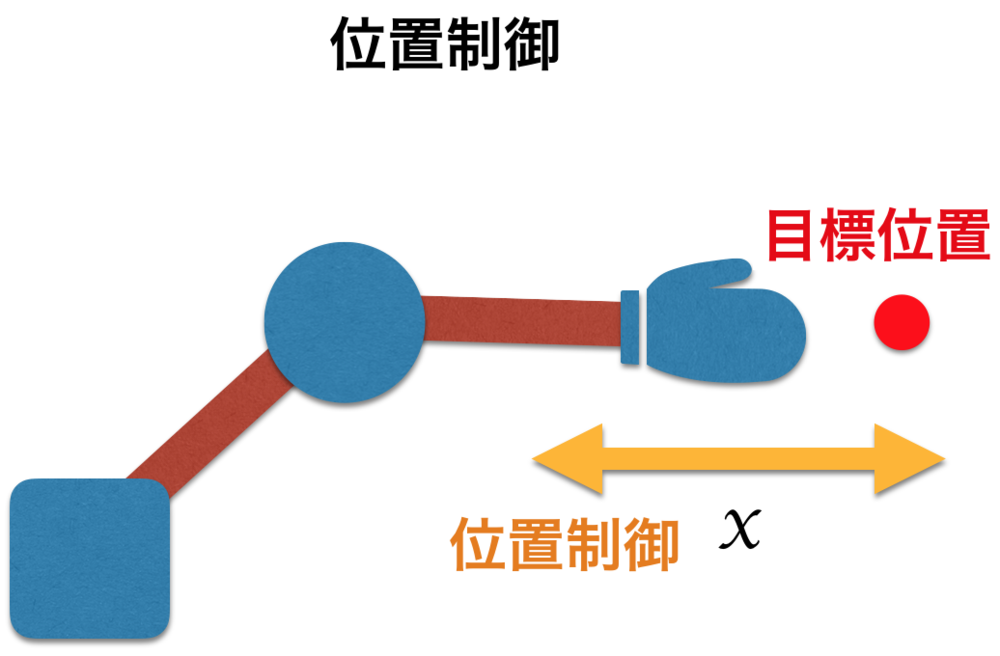
ロボットの手先(エンドエフェクタ)の位置制御(Position Control)は、ロボットの手先に出力すべきトルクや力を指定せずに目標位置に腕を動かすように指令するだけの位置制御.位置しか制御しないため、ロボットが腕を動かすときに気にしているのはロボットの関節角度だけになります.突然の環境変化や障害物に弱く、ロボット自身、環境を損傷する可能性があります.



この章を学ぶ前に必要な知識
条件
- 手先力の目標はとくにない
効果
- ロボットの手先位置が特定の位置にくるようにアームを動かす
ポイント
- 位置がずれたときに臨機応変に修正する融通さがない
- 誤った位置などが指定されると大きなトルクがかかる場合がある
- ものを押す場合や把持する場合に想定以上の力がかかりうる
- 力制御の方が実タスクを実行する上では扱いやすい
解 説
ロボットの手先(エンドエフェクタ)の位置制御(Position Control)は、ロボットの手先に出力すべきトルクや力を指定せずに目標位置に腕を動かすように指令するだけの位置制御.
位置しか制御しないため、ロボットが腕を動かすときに気にしているのはロボットの関節角度だけになります.突然の環境変化や障害物に弱く、ロボット自身、環境を損傷する可能性があります.
位置制御より力制御の方が環境またはロボット自身への影響を考慮した制御が行え、実タスクを遂行する上でも扱いやすい.
| 位置制御(エンドエフェクタ)とは |
位置制御を行う際には、力制御と異なり
・力の大きさのフィードバックなどを行わないので、手先に力を測るセンサは必要ない.
・制御する上で必要なのはロボットアームの各関節角度のみ.(エンコーダ)
位置制御の流れは以下.
<関節補間>
関節角度を補間して位置制御をする(手先がどう動くかわからない)場合は、
1. ヤコビ行列などによる逆運動学を解き、目標位置の関節角度を求める
2. 関節角度が開始状態から1.で求めた状態になるように線形で変えるように指示
または
<手先補間>
手先位置を線形補間してエンドエフェクタの位置制御をする(関節角度がどう変化するかわからない)場合は、
1. 初期位置からゴールまでに向かう線状を何点か分割して手先位置がくるべきサブゴールを作成
2. スタートから近いサブゴールでの、逆運動学を解いてそのときにあるべき関節角度を求める.
3. 2.をゴールまで繰り返して手先をほぼ線形補間しながらゴールまで移動させる.
| 位置制御を行う |
逆運動学に関して念のためにリンクを貼っておきます | ヤコビ行列による逆運動学 |
FABRIKによる逆運動学もリンクしておきます. | FABRIKによる逆運動学 |
位置制御のみでは力の大きさを気にしないために
・誤った目標位置を与えるとロボット自身または環境を破壊してでもアームを伸ばそうとする.
・ものを押すタスクや把持するタスクで力加減を誤って破壊する可能性がある.
・力のフィードバックを受けないので、環境に接触できているのか把持できているのかも判断しにくい
が起こりうることに十分注意されたい. | 位置制御の注意点 |
| 位置制御 |
この章を学んで新たに学べる
Comments
Reasons
知識: ヤコビ行列による逆運動学
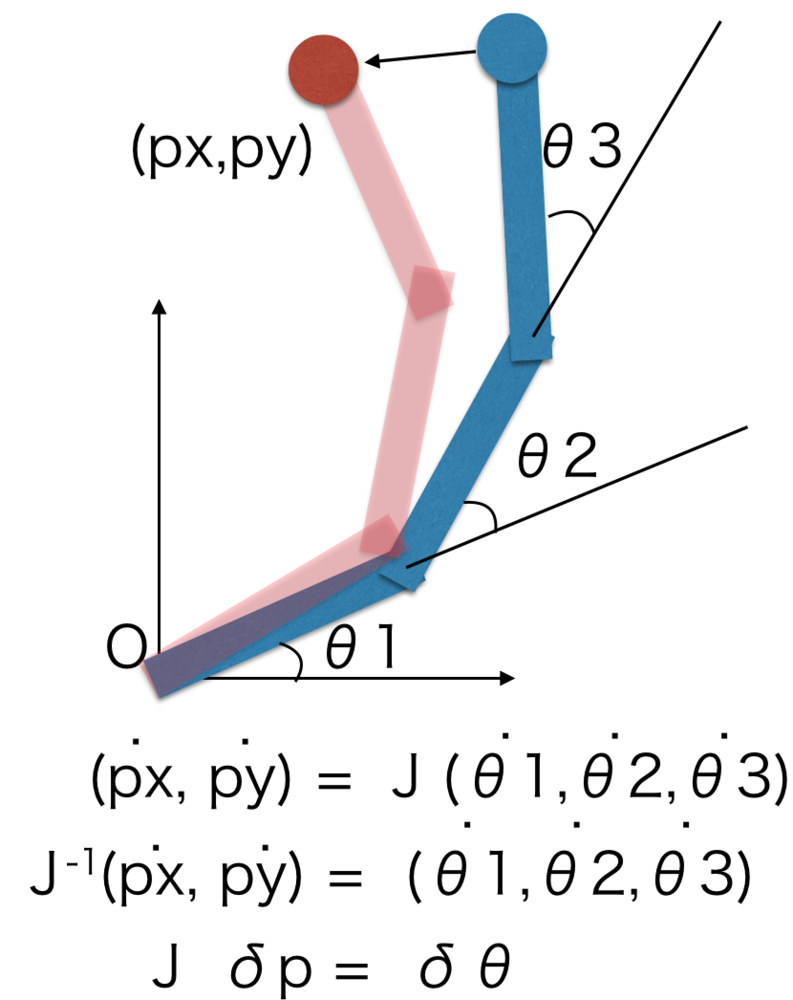
関節角度と手先位置のp=f(θ)の関係からδθ=J^-1()δp(Jはヤコビ行列)を導きこの勾配を利用して近似的に関節角を探索する方法についてまとめます.一般的に逆運動学は解析的に解けないため、このような繰り返し計算による解の導出を行います.ヤコビ行列による逆運動学はその中でも最も有名な手法です.
知識: FABRIKによる逆運動学
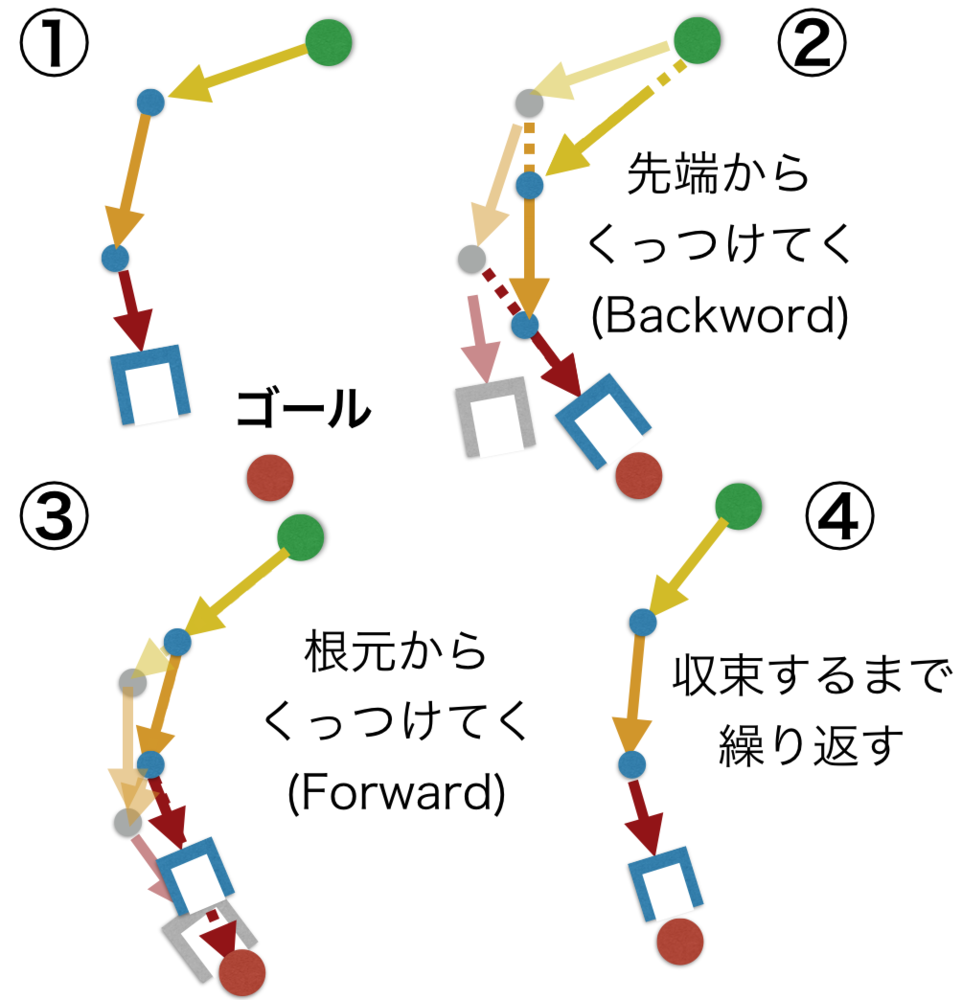
FABRIK IK(Forward And Backward Reaching inverse kinematics)は、根元と先端を交互に基準として繰り返しながら関節角度を調整していくことで、逆運動学の解を得る.アルゴリズムはシンプルで、実装も容易い.