工学
世の中のエネルギーや資源を用いまた応用して、様々な課題を解決していく工学に関してまとめる.機械工学や情報工学材料工学、などハードウェア、ソフトウェア様々な分野を含んでいる.
2017.9.2
-
410Views
-
0Watch
-
28Knows
|
|
工学の新規投稿
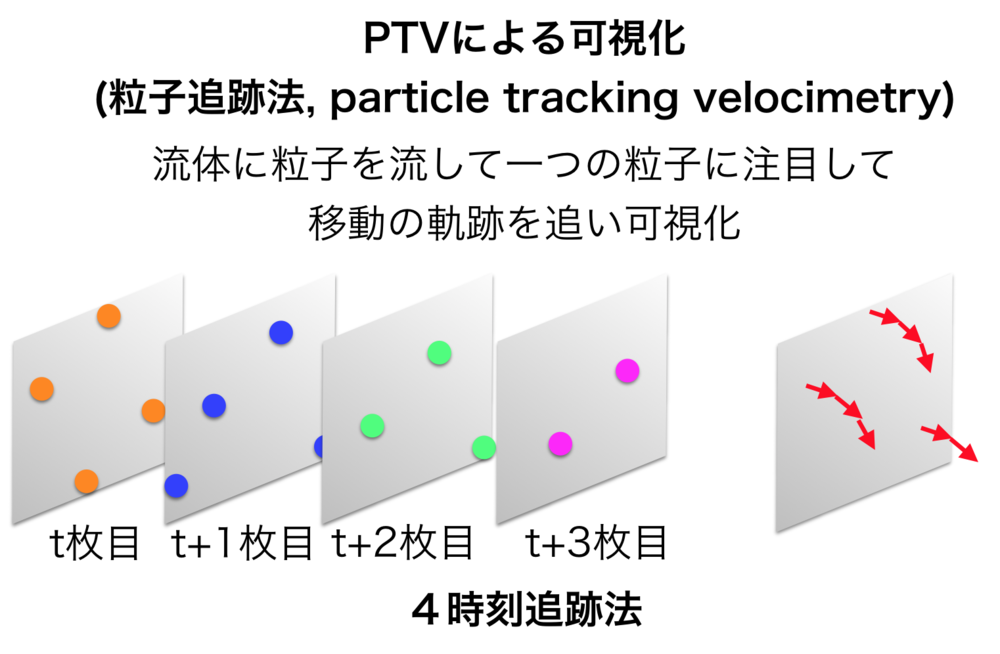
PTVによる可視化
PTV(Particle Tracking Velocimetry,粒子追跡法)は、流体の中に粒子を流すなどして追跡対象の粒子の動きを追う手法.PIVは画像領域に写る複数粒子全体のの変位量を求めていたが、PTVではとある粒子のみを追跡してその軌跡を求める.追跡する粒子が多いと正しく計測できない恐れがあるので密度は高くできない.
PV 1000
Fav 0
2018.12.09
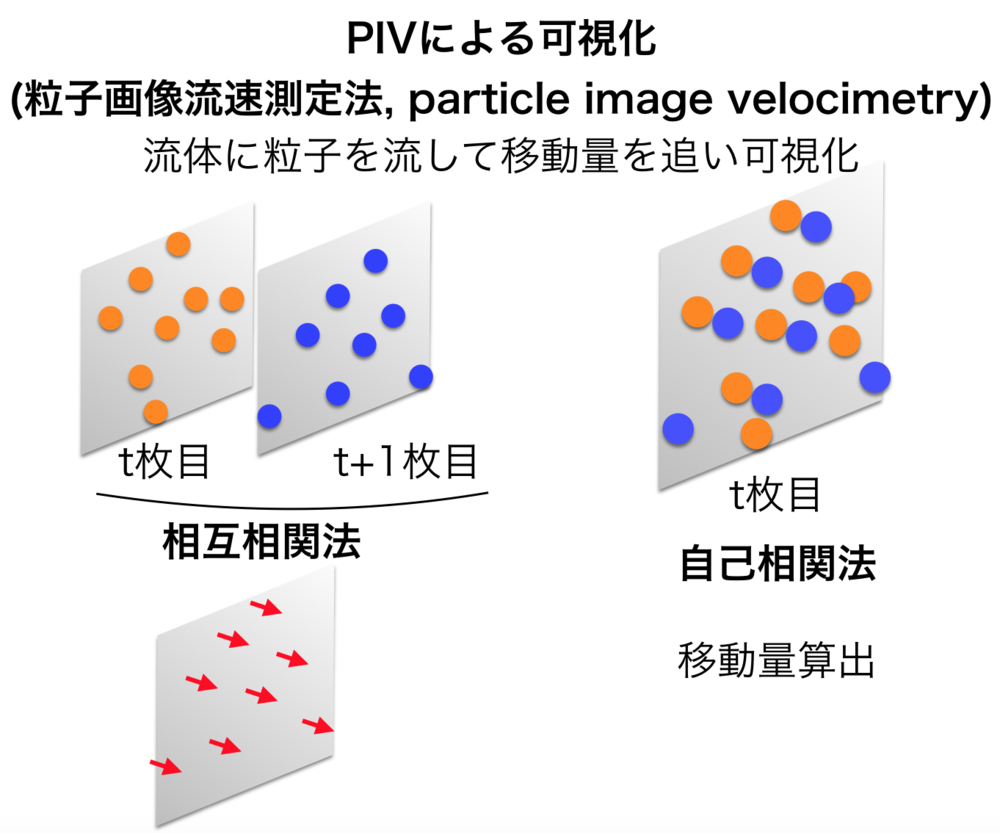
PIVによる流体可視化
PIV(粒子画像流速測定法, particle image velocimetry)は、気体や液体などの流体の流れによく追従するトレーサー粒子(マーカーのようなもの)を流してそれを高速なカメラで撮像し微小単位時間の移動量から速度を求め可視化する手法.2枚の画像を用いて相互相関法によって求める方法と1枚の画像に2回重ねて撮像して自己相関法によって求める方法があります.
PV 676
Fav 0
2018.12.09
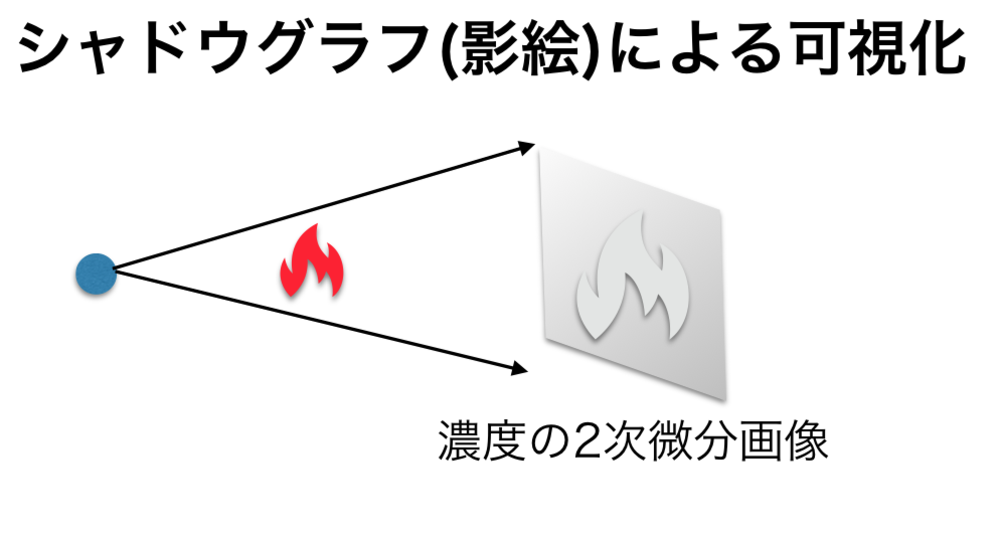
シャドウグラフによる可視化
シャドウグラフ法(Shadow Graph)は点光源とスクリーンを用いた単純な構成で気体や液体の濃度の変化を可視化する技術.シュリーレン法より以前は頻繁に用いられていたが、気体の濃度の二次微分になりまたシュリーレン法よりもコントラストが得られにくい.
PV 2159
Fav 0
2018.12.02
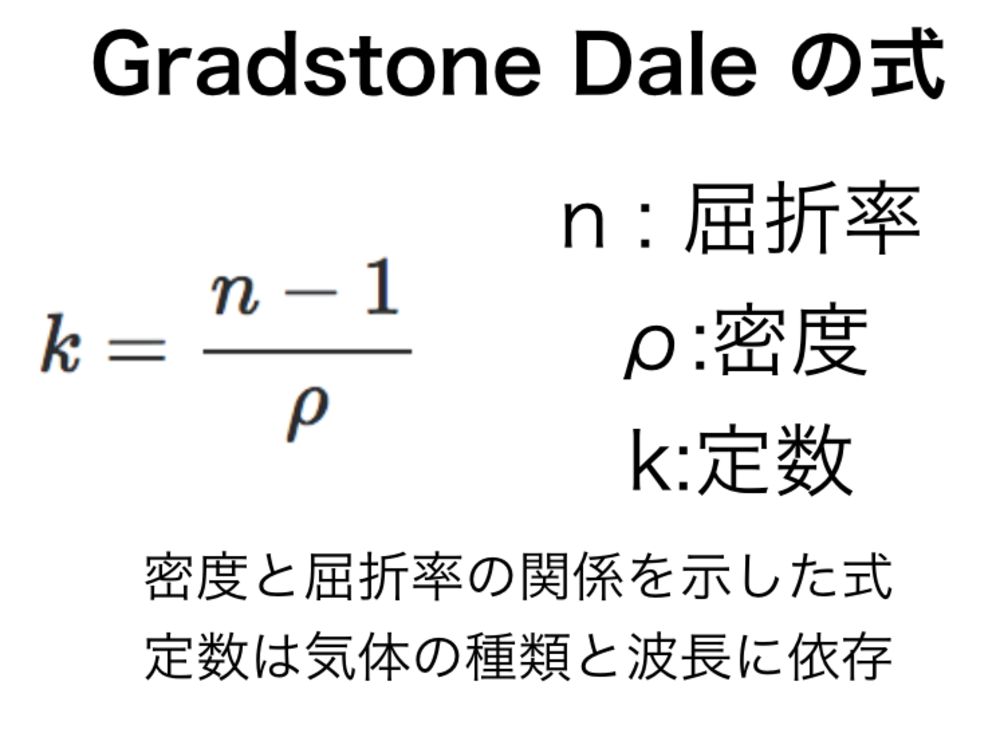
グラッドストーン・デールの式
グラッドストーン・デールの式(Gladstone-Dale Relation, rule)は、気体による定数を用いて密度と屈折率を関連づける式.
PV 1756
Fav 0
2018.12.02
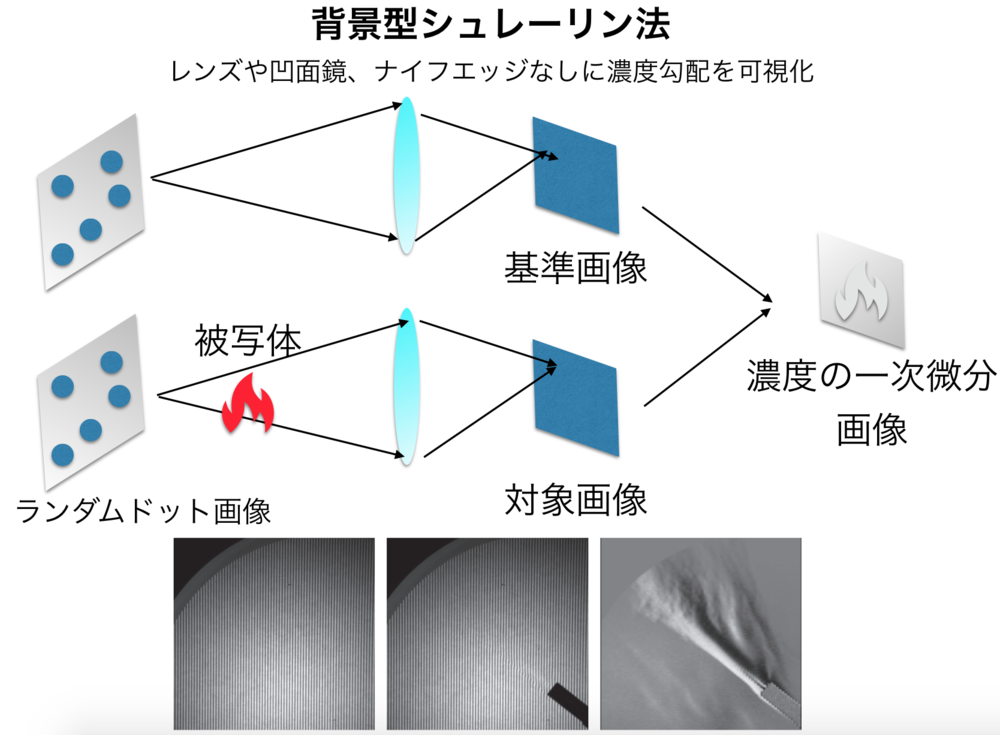
背景型シュリーレン法
背景型シュリーレン法(BOS, Background-Oriented Schlieren)は液体や気体の濃度勾配を可視化するのに用いられる一般的な手法の一つ.通常のシュリーレン法よりも簡易なシステムにおいて実現することができレンズやナイフエッジなどが不要となっている.太陽や月の光を用いて航空機の周りの衝撃波を可視化することも可能.基準画像との相互相関法によって画像を生成する.
PV 1071
Fav 0
2018.12.02
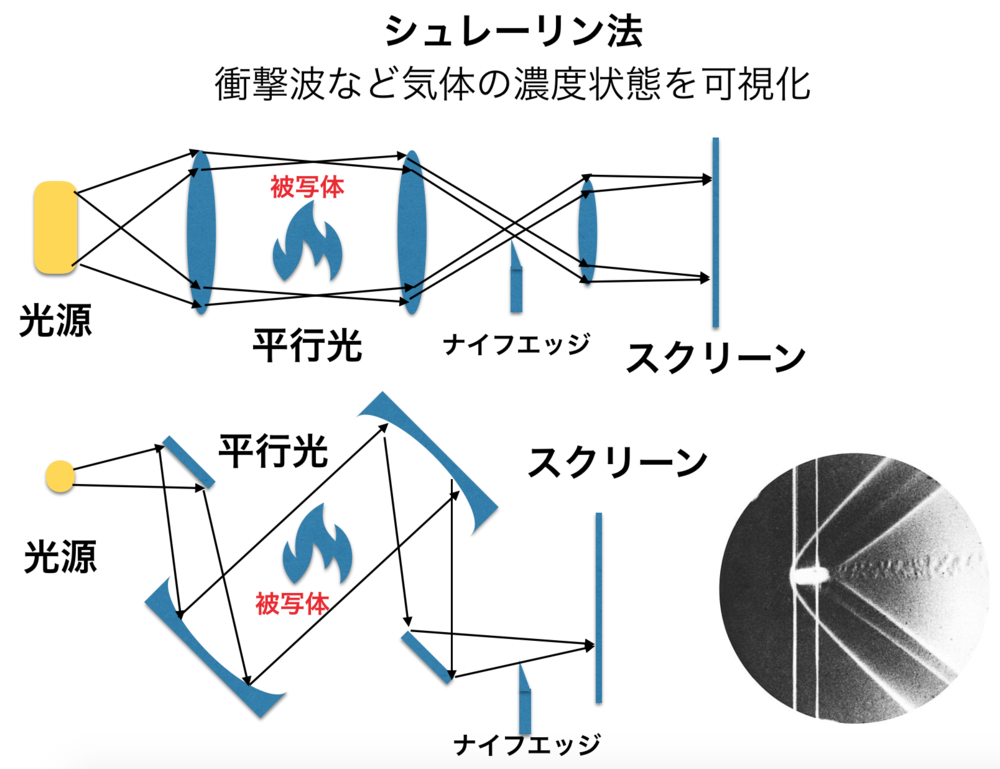
シュリーレン法
シュリーレン法は、空気の状態によって密度が変化し屈折率が変化することを利用して平行光でその状態を可視化する手法.メジャーな手法の一つでShadowGraph(影絵)より微細な変化を鮮明に映し出すことが可能です.
PV 1558
Fav 0
2018.12.02
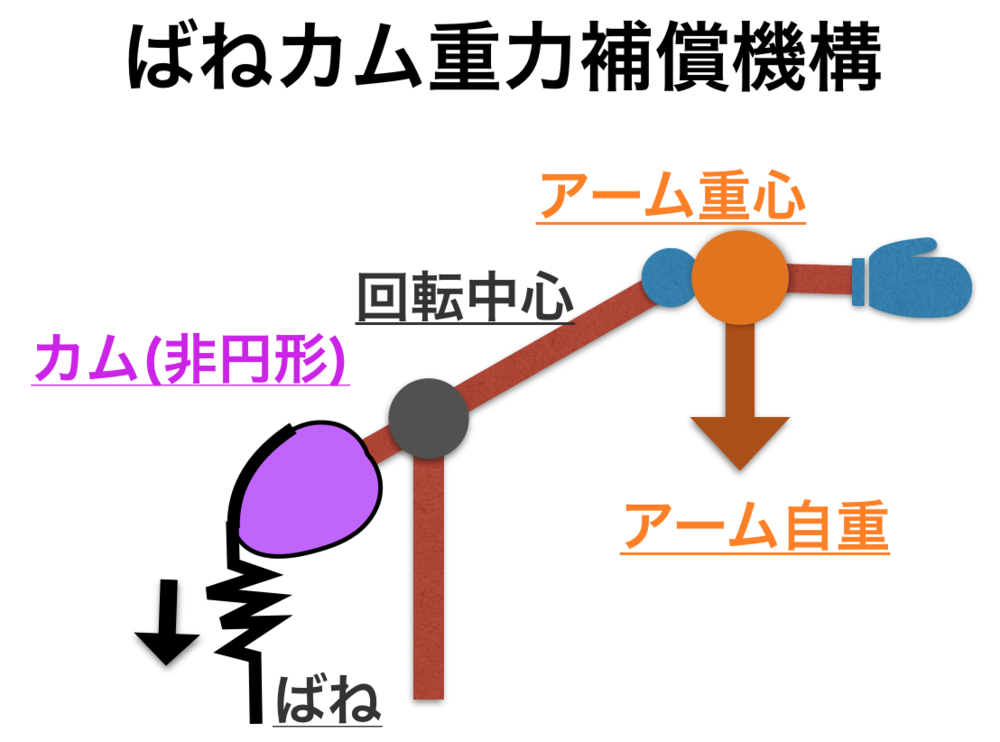
ばねカム重力補償機構
ばねカム重力補償機構は、ロボットアームの重力を相殺するためにばねとカム機構を用いることで重力補償を実現する機構のこと.適切に設計することでばねの伸びによって弾性力が決まるのを調整することができ、一定の補償力を出力できる.
PV 619
Fav 0
2018.11.07
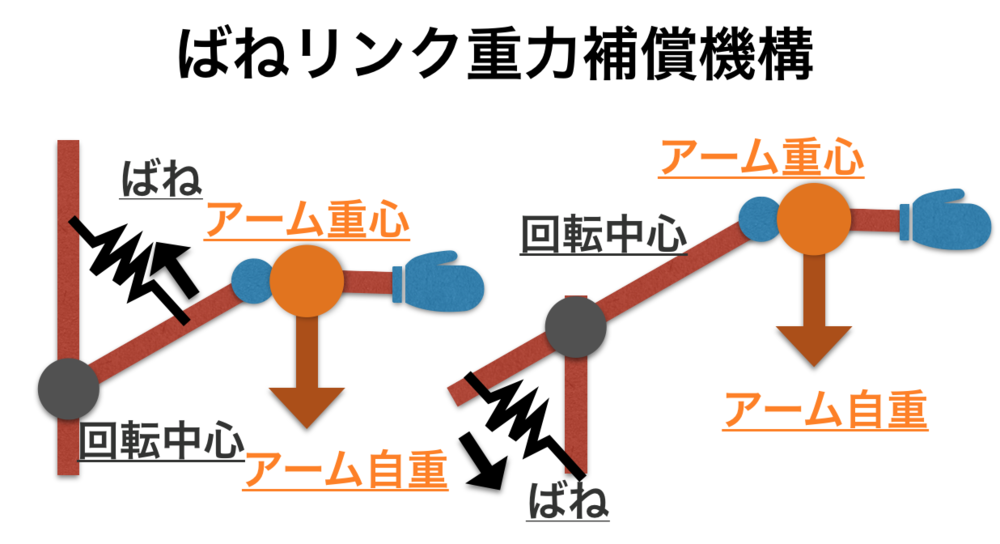
ばねリンク重力補償機構
ばねリンク重力補償機構は、バネを用いて重力補償をハードで実現する機構.通常バネだけで重力補償するのは難しいため、他の方法によって釣り合うように調整する.カウンタウェイトのように重くならず、エネルギー効率がよく、非常時にもバネが突然の落下を防いでくれる点などが好まれる.
PV 760
Fav 0
2018.11.07
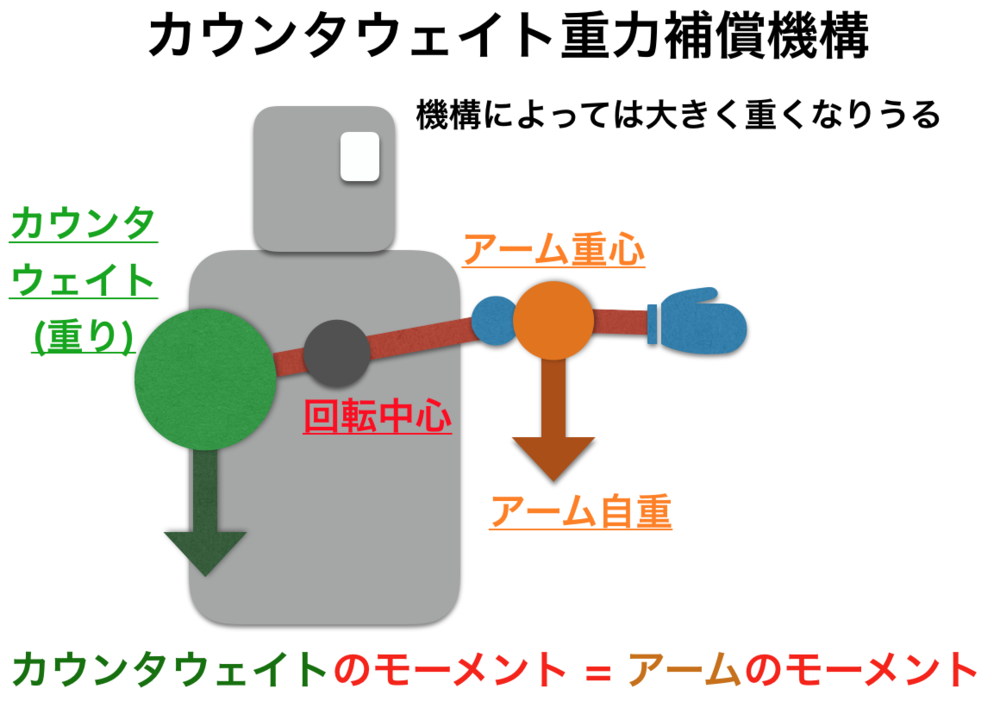
カウンタウェイト重力補償機構
カウンタウェイト重力補償機構は、ロボットアームの自重を相殺するような重りをあらかじめアームの反対側に備えることで機構的に重力補償をしトルクを抑えるアーム機構.アームの変形などではバランスが取れずまたロボット全体の重量が増えるなどあり、アーム根元のみに取り付けることが一般的.
PV 790
Fav 0
2018.11.07
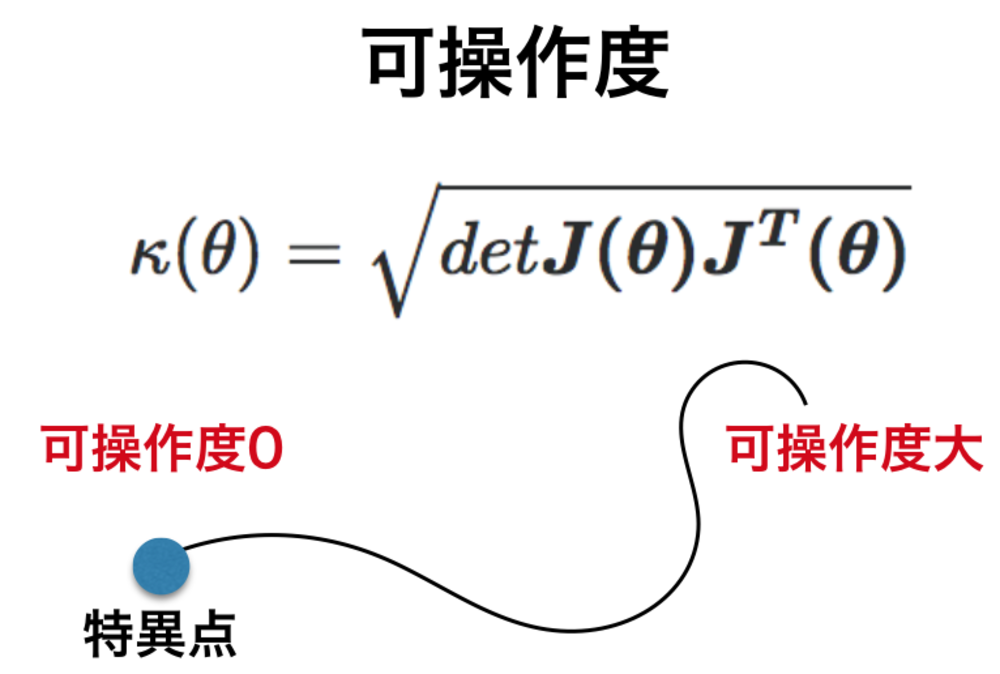
可操作度
可操作度は特異点を避けたいときに指標となる特異点との距離に当たるような数値を求められる.特異点において可操作度の値は0となる.ヤコビ行列Jを用いて求めることが可能.
PV 683
Fav 0
2018.11.04
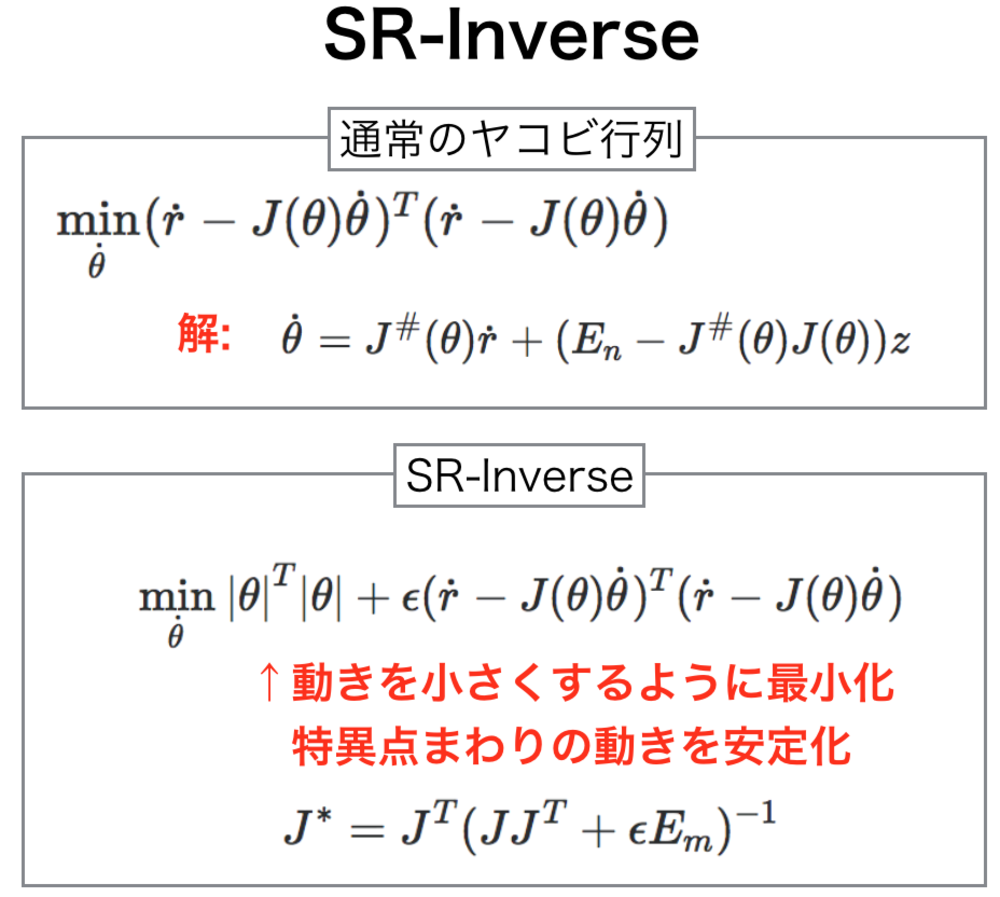
SR-Inverse
SR-Inverse(Singularity-Robust Inverse)は特異点に近くなるにつれてヤコビ行列がフルランクではなくなりロボットの動きが大きくなってしまうのを防ぐために擬似逆行列を別行列に置き換えた逆運動学.特異点まわりを避け大きな運動をしないようにすることが可能.
PV 591
Fav 0
2018.10.30
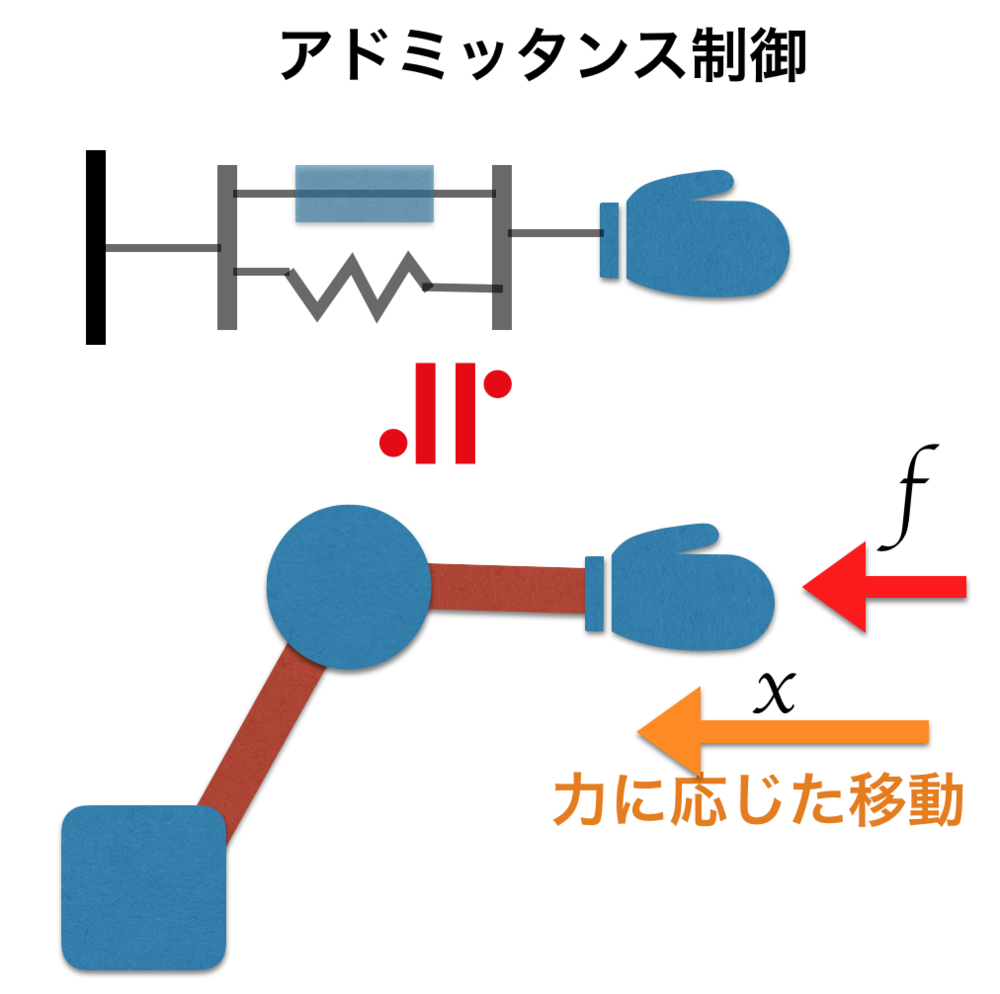
アドミッタンス制御
アドミッタンス制御は、インピーダンス制御の反対で入力された力を元に位置や速度決定する制御手法.人間が外から力を与えるとそれに応じてロボットの手先位置を柔らかく変えていく
PV 3128
Fav 0
2018.10.28
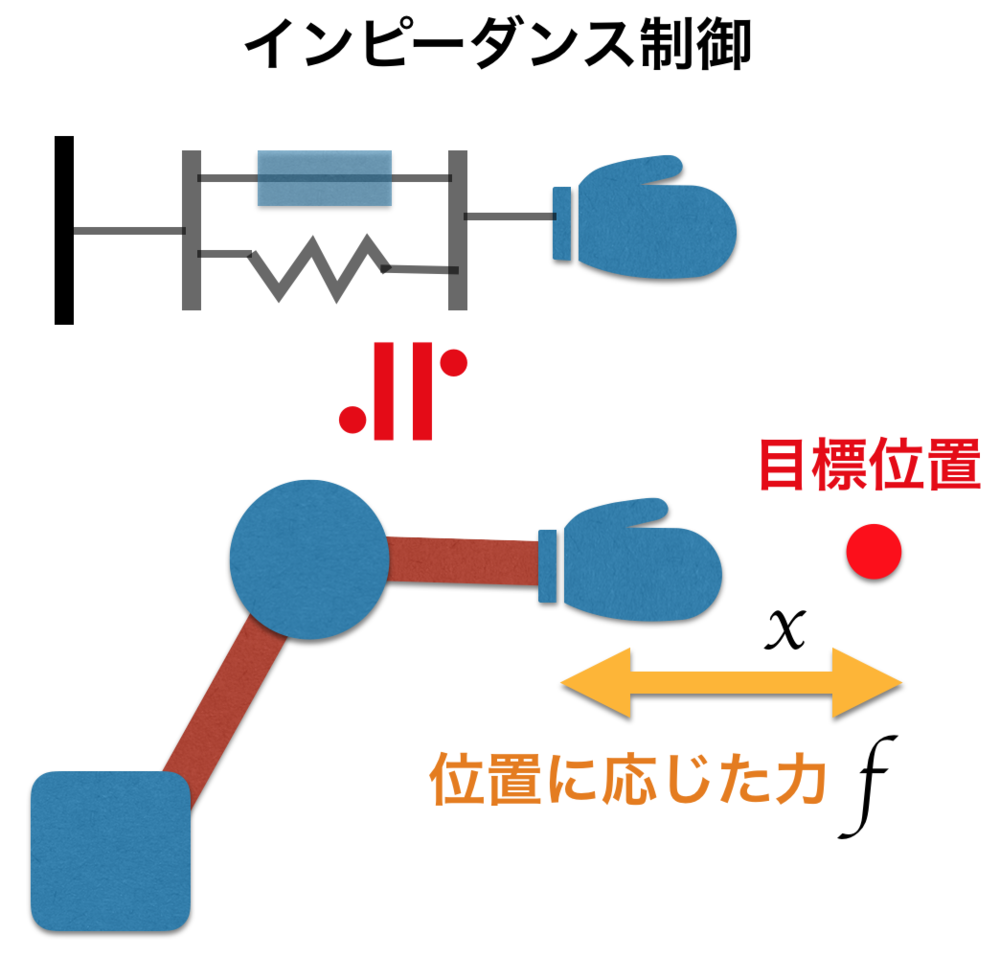
インピーダンス制御
インピーダンス制御はバネマスダンパのモデルを元に仮想物体を想定してインピーダンスを制御する制御方法.力を特定の値に修正をするのみの直接力制御とは異なる間接力制御.外からの力の変化に対して緩やかに変化をする.接触制御.
PV 5523
Fav 0
2018.10.26

ハイブリッド制御
ハイブリッド制御は、力制御と位置制御を適宜分担していいとこどりをする制御.6軸を力制御に任せる(拘束なし)か位置制御(拘束あり)に任せるかを決めて独立分担して制御を行う.
PV 1278
Fav 0
2018.10.26
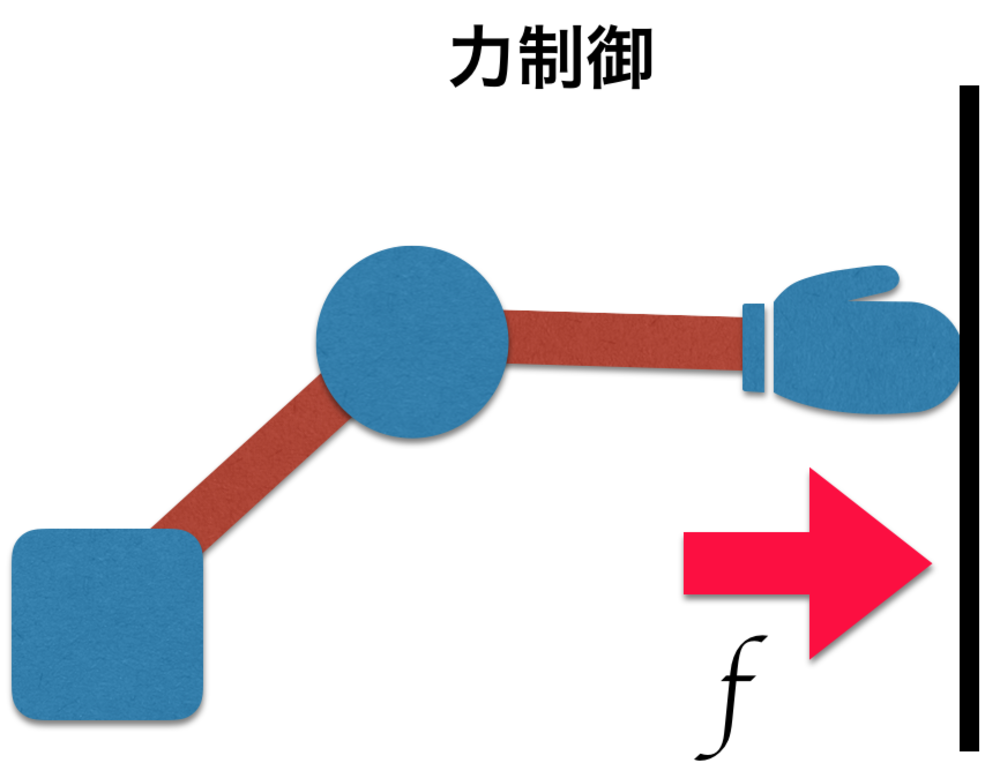
力制御
力制御は、ロボットの手先(エンドエフェクタ)などに取り付けた力センサをフィードバックさせて、力のみを制御してロボットアームを制御します.位置制御のみの場合よりは安全な動作を可能にします.通常力制御と位置制御両方を組み合わせます.
PV 1696
Fav 0
2018.10.25
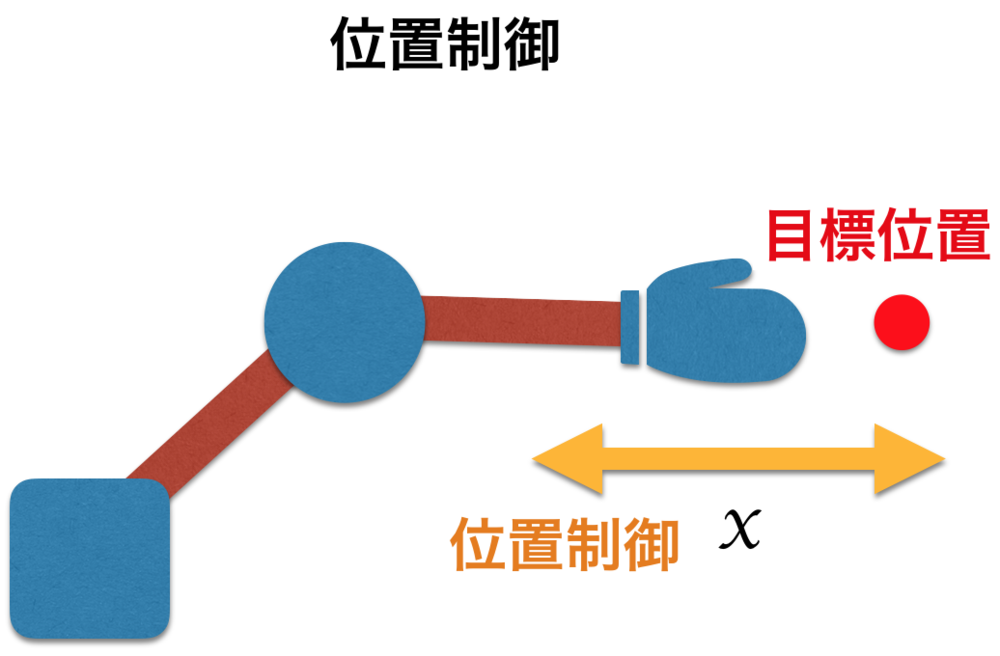
位置制御(エンドエフェクタ)
ロボットの手先(エンドエフェクタ)の位置制御(Position Control)は、ロボットの手先に出力すべきトルクや力を指定せずに目標位置に腕を動かすように指令するだけの位置制御.位置しか制御しないため、ロボットが腕を動かすときに気にしているのはロボットの関節角度だけになります.突然の環境変化や障害物に弱く、ロボット自身、環境を損傷する可能性があります.
PV 960
Fav 0
2018.10.25
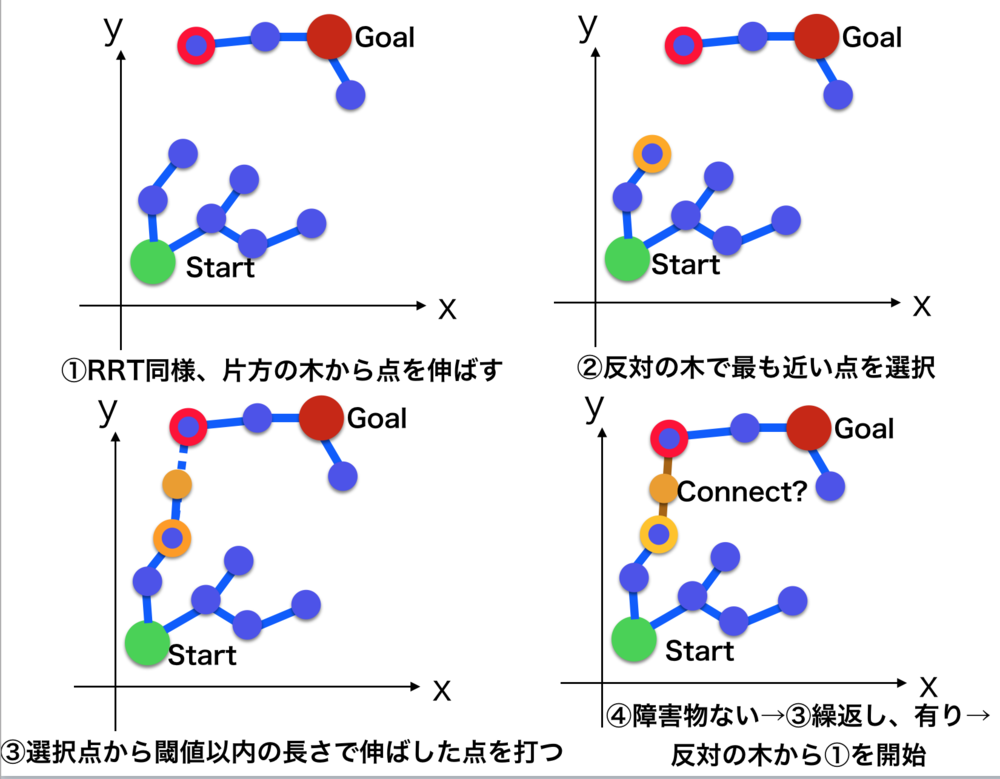
RRT-Connect
RRT-ConnectはRRTを用いてコンフィギュレーション空間における高次元空間の探索を効率よく行い、スタートからゴールまでのパスを見つけるアルゴリズム.
PV 451
Fav 0
2018.10.14
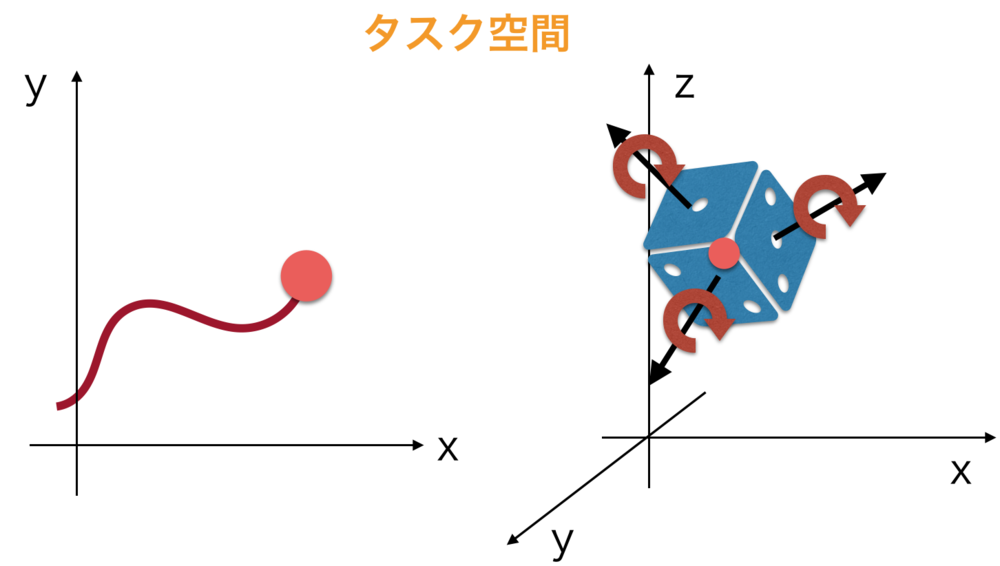
タスク空間
タスク空間は、ロボット工学においてタスクを表現する上でもっとも自然な座標系を用いて表現した空間のこと.例えばある軌道でボールを動かしたいときは、(x,y,z)の座標系、剛体の位置を制御したいときは、姿勢を含めて(x,y,z,θ,γ,ψ)の6座標を使って表現する.
PV 382
Fav 0
2018.10.14
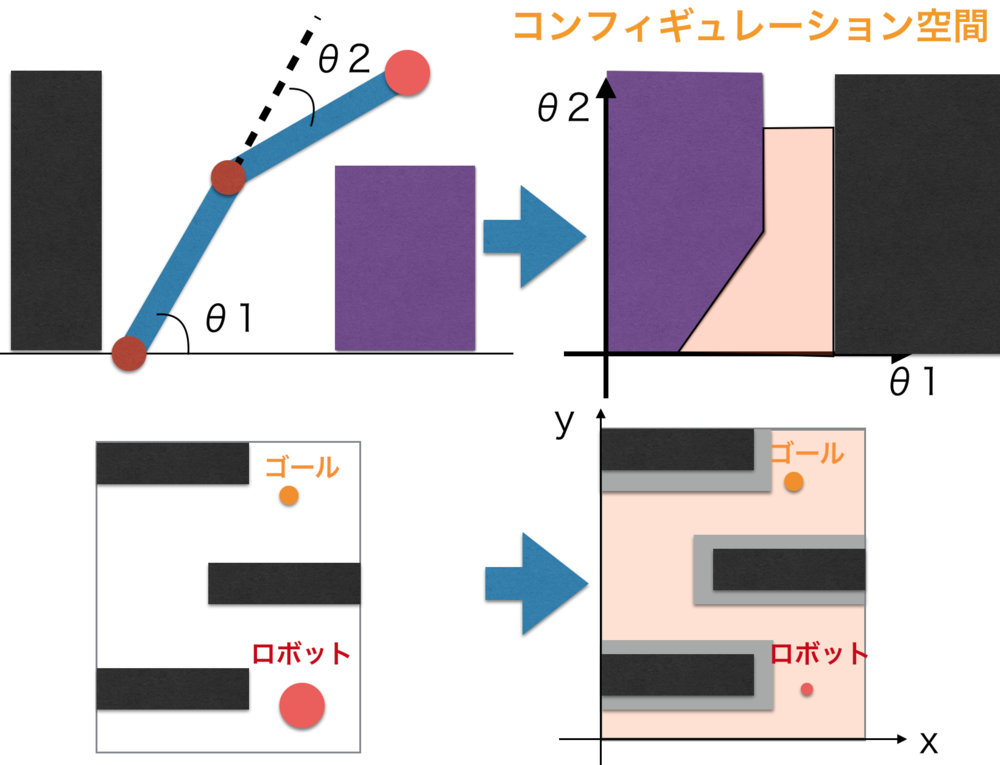
コンフィギュレーション空間
コンフィギュレーション空間(C-Space, Configuration Space)はロボットの経路計画、軌道計画等を考える上でロボットが取りうる姿勢や位置、関節角度等を表現する空間のこと.自由度が高いロボットではコンフィギュレーション空間が高次元になり、計算量が膨大になる.コンフィギュレーションとはロボットのパラメータの値を全て指定したもので、コンフィギュレーション空間はロボットが取りうる全ての値を指す.
PV 1078
Fav 0
2018.10.14
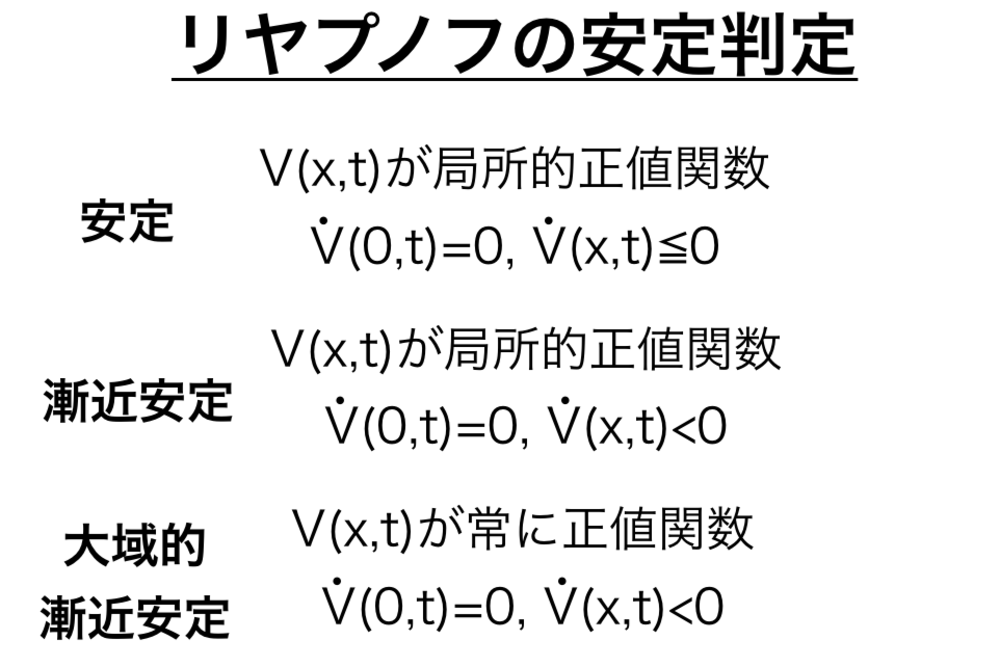
リヤプノフの安定判別法
リヤプノフの安定判別法を用いてシステムの解析が難しい場合でも、システムの状態の安定性を評価することができます.ここでの安定性はもちろんリヤプノフの意味での安定性を指します.解析的にシステムの解を求めて安定性を評価する方法をリヤプノフの第1法(Lyapunov's first method)と呼び、ここで紹介するようなエネルギー関数の考察によって安定性の解析を行うことを直接法、リヤプノフの第2法(Lyapunov's second method)と呼ぶ.
PV 447
Fav 0
2018.09.10
特異点を回避する逆運動学って可能ですか?
PV 171
Fav 0
2017.09.27
逆運動学で直動リンクを含めて解くことはできませんか?
PV 113
Fav 0
2017.09.25
ロボットの経路生成をさせたいのですが最もメジャーな方法はなんでしょうか?
PV 136
Fav 0
2017.09.23
野菜をとるロボットとかって何が難しい?
PV 145
Fav 0
2017.09.22
ロボットに環境の障害物を覚えさせたい
PV 139
Fav 0
2017.09.22
工学人気知識・質問
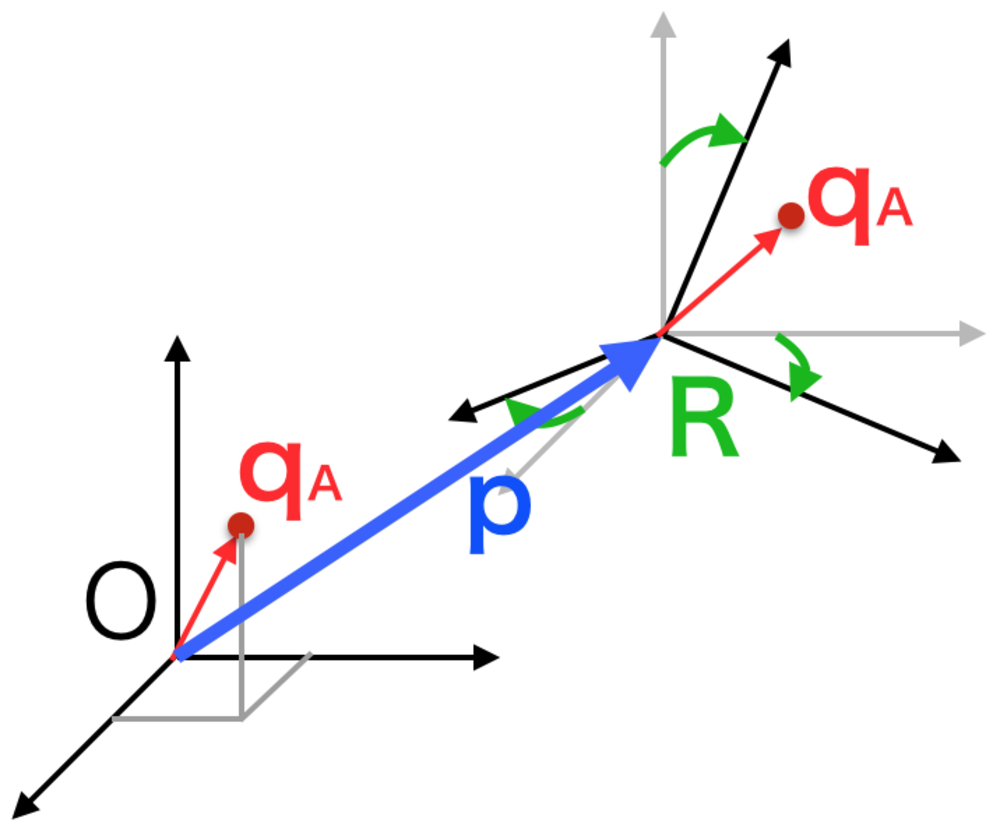
同次変換行列
リンクの位置と回転を同次に表現して動力学や運動学での扱いを簡単にします.位置と回転とを一つの行列にまとめ上げ4x4の行列にしたものを同次変換行列と呼びます.複数の変換を行いたい場合はそれら行列の積をとることで変換が容易に求まります.
PV 5759
Fav 0
2018.07.11
インピーダンス制御
インピーダンス制御はバネマスダンパのモデルを元に仮想物体を想定してインピーダンスを制御する制御方法.力を特定の値に修正をするのみの直接力制御とは異なる間接力制御.外からの力の変化に対して緩やかに変化をする.接触制御.
PV 5523
Fav 0
2018.10.26
アドミッタンス制御
アドミッタンス制御は、インピーダンス制御の反対で入力された力を元に位置や速度決定する制御手法.人間が外から力を与えるとそれに応じてロボットの手先位置を柔らかく変えていく
PV 3128
Fav 0
2018.10.28
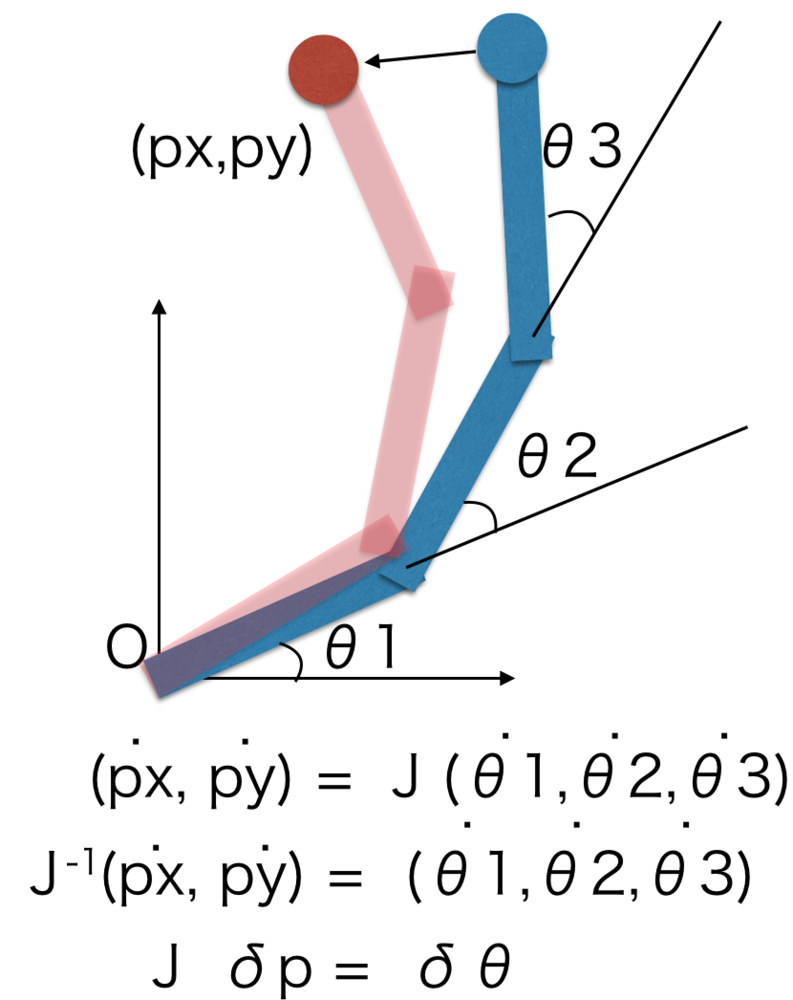
ヤコビ行列による逆運動学
関節角度と手先位置のp=f(θ)の関係からδθ=J^-1()δp(Jはヤコビ行列)を導きこの勾配を利用して近似的に関節角を探索する方法についてまとめます.一般的に逆運動学は解析的に解けないため、このような繰り返し計算による解の導出を行います.ヤコビ行列による逆運動学はその中でも最も有名な手法です.
PV 2524
Fav 0
2018.07.17
シャドウグラフによる可視化
シャドウグラフ法(Shadow Graph)は点光源とスクリーンを用いた単純な構成で気体や液体の濃度の変化を可視化する技術.シュリーレン法より以前は頻繁に用いられていたが、気体の濃度の二次微分になりまたシュリーレン法よりもコントラストが得られにくい.
PV 2159
Fav 0
2018.12.02
グラッドストーン・デールの式
グラッドストーン・デールの式(Gladstone-Dale Relation, rule)は、気体による定数を用いて密度と屈折率を関連づける式.
PV 1756
Fav 0
2018.12.02
力制御
力制御は、ロボットの手先(エンドエフェクタ)などに取り付けた力センサをフィードバックさせて、力のみを制御してロボットアームを制御します.位置制御のみの場合よりは安全な動作を可能にします.通常力制御と位置制御両方を組み合わせます.
PV 1696
Fav 0
2018.10.25
シュリーレン法
シュリーレン法は、空気の状態によって密度が変化し屈折率が変化することを利用して平行光でその状態を可視化する手法.メジャーな手法の一つでShadowGraph(影絵)より微細な変化を鮮明に映し出すことが可能です.
PV 1558
Fav 0
2018.12.02
ハイブリッド制御
ハイブリッド制御は、力制御と位置制御を適宜分担していいとこどりをする制御.6軸を力制御に任せる(拘束なし)か位置制御(拘束あり)に任せるかを決めて独立分担して制御を行う.
PV 1278
Fav 0
2018.10.26
コンフィギュレーション空間
コンフィギュレーション空間(C-Space, Configuration Space)はロボットの経路計画、軌道計画等を考える上でロボットが取りうる姿勢や位置、関節角度等を表現する空間のこと.自由度が高いロボットではコンフィギュレーション空間が高次元になり、計算量が膨大になる.コンフィギュレーションとはロボットのパラメータの値を全て指定したもので、コンフィギュレーション空間はロボットが取りうる全ての値を指す.
PV 1078
Fav 0
2018.10.14
背景型シュリーレン法
背景型シュリーレン法(BOS, Background-Oriented Schlieren)は液体や気体の濃度勾配を可視化するのに用いられる一般的な手法の一つ.通常のシュリーレン法よりも簡易なシステムにおいて実現することができレンズやナイフエッジなどが不要となっている.太陽や月の光を用いて航空機の周りの衝撃波を可視化することも可能.基準画像との相互相関法によって画像を生成する.
PV 1071
Fav 0
2018.12.02
PTVによる可視化
PTV(Particle Tracking Velocimetry,粒子追跡法)は、流体の中に粒子を流すなどして追跡対象の粒子の動きを追う手法.PIVは画像領域に写る複数粒子全体のの変位量を求めていたが、PTVではとある粒子のみを追跡してその軌跡を求める.追跡する粒子が多いと正しく計測できない恐れがあるので密度は高くできない.
PV 1000
Fav 0
2018.12.09
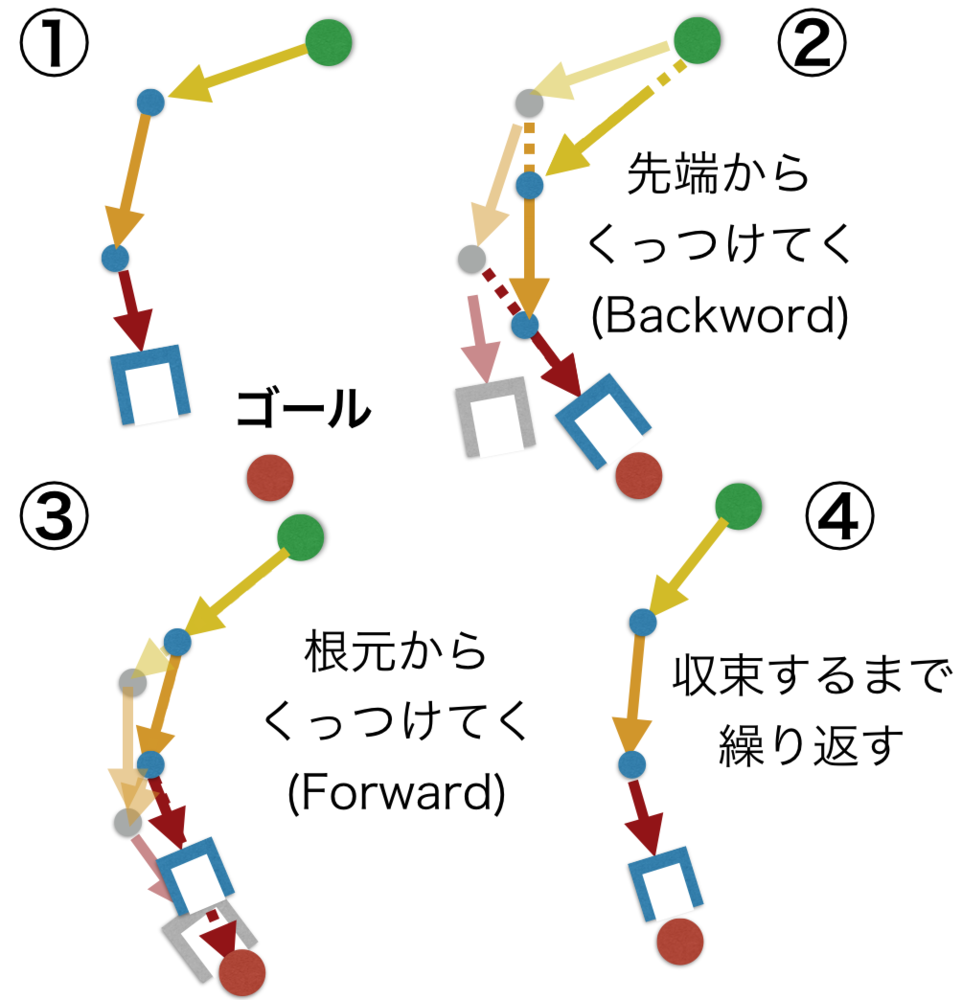
FABRIKによる逆運動学
FABRIK IK(Forward And Backward Reaching inverse kinematics)は、根元と先端を交互に基準として繰り返しながら関節角度を調整していくことで、逆運動学の解を得る.アルゴリズムはシンプルで、実装も容易い.
PV 964
Fav 0
2018.09.06
位置制御(エンドエフェクタ)
ロボットの手先(エンドエフェクタ)の位置制御(Position Control)は、ロボットの手先に出力すべきトルクや力を指定せずに目標位置に腕を動かすように指令するだけの位置制御.位置しか制御しないため、ロボットが腕を動かすときに気にしているのはロボットの関節角度だけになります.突然の環境変化や障害物に弱く、ロボット自身、環境を損傷する可能性があります.
PV 960
Fav 0
2018.10.25
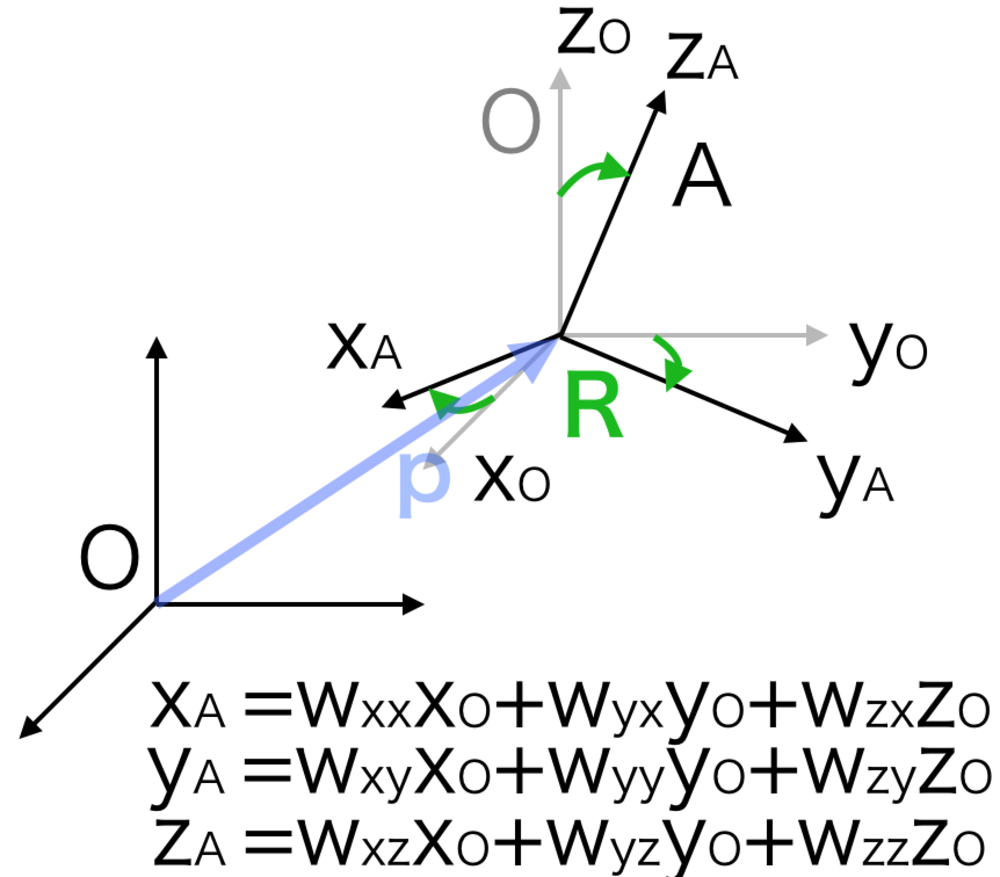
姿勢変換行列
ある座標系の姿勢を表現できればロボットのリンクや座標系の回転を記述する際に利用できる.姿勢変換行列は、行列の形である座標系の別座標系を基準としたときの回転を表現したもの.回転行列とも呼ばれる.
PV 951
Fav 0
2018.07.11
カウンタウェイト重力補償機構
カウンタウェイト重力補償機構は、ロボットアームの自重を相殺するような重りをあらかじめアームの反対側に備えることで機構的に重力補償をしトルクを抑えるアーム機構.アームの変形などではバランスが取れずまたロボット全体の重量が増えるなどあり、アーム根元のみに取り付けることが一般的.
PV 790
Fav 0
2018.11.07
ばねリンク重力補償機構
ばねリンク重力補償機構は、バネを用いて重力補償をハードで実現する機構.通常バネだけで重力補償するのは難しいため、他の方法によって釣り合うように調整する.カウンタウェイトのように重くならず、エネルギー効率がよく、非常時にもバネが突然の落下を防いでくれる点などが好まれる.
PV 760
Fav 0
2018.11.07
可操作度
可操作度は特異点を避けたいときに指標となる特異点との距離に当たるような数値を求められる.特異点において可操作度の値は0となる.ヤコビ行列Jを用いて求めることが可能.
PV 683
Fav 0
2018.11.04
PIVによる流体可視化
PIV(粒子画像流速測定法, particle image velocimetry)は、気体や液体などの流体の流れによく追従するトレーサー粒子(マーカーのようなもの)を流してそれを高速なカメラで撮像し微小単位時間の移動量から速度を求め可視化する手法.2枚の画像を用いて相互相関法によって求める方法と1枚の画像に2回重ねて撮像して自己相関法によって求める方法があります.
PV 676
Fav 0
2018.12.09
ばねカム重力補償機構
ばねカム重力補償機構は、ロボットアームの重力を相殺するためにばねとカム機構を用いることで重力補償を実現する機構のこと.適切に設計することでばねの伸びによって弾性力が決まるのを調整することができ、一定の補償力を出力できる.
PV 619
Fav 0
2018.11.07
特異点を回避する逆運動学って可能ですか?
PV 171
Fav 0
2017.09.27
野菜をとるロボットとかって何が難しい?
PV 145
Fav 0
2017.09.22
ロボットに環境の障害物を覚えさせたい
PV 139
Fav 0
2017.09.22
ロボットの経路生成をさせたいのですが最もメジャーな方法はなんでしょうか?
PV 136
Fav 0
2017.09.23
逆運動学で直動リンクを含めて解くことはできませんか?
PV 113
Fav 0
2017.09.25